CAN/CANFD
CCP/UDS
Bootloader/OTA
ECU/VCU/FCU
Simulink/ECUCoder
Ethernet
Hardware
Download
上一篇
下一篇
CAN FD基础知识
一.CAN FD消息帧
二.CAN FD位填充
三.CAN FD与传统CAN的区别
四.使用控制器收发CAN FD报文
-4.1.CAN FD模块初始化设置
-4.2.发送CAN FD报文
-4.3.定时接收指定ID的CANFD报文
-4.4.CAN FD通信演示
五.CAN FD的兼容性
-5.1.ISO与non-ISO CAN FD
-5.2.CAN FD与传统CAN的兼容性
六.CAN FD的前景
回到顶部
CAN FD基础知识
一.CAN FD消息帧
二.CAN FD位填充
三.CAN FD与传统CAN的区别
四.使用控制器收发CAN FD报文
-4.1.CAN FD模块初始化设置
-4.2.发送CAN FD报文
-4.3.定时接收指定ID的CANFD报文
-4.4.CAN FD通信演示
五.CAN FD的兼容性
-5.1.ISO CAN FD与non-ISO CAN FD的兼容性
-5.2.CAN FD与传统CAN的兼容性
六.CAN FD的前景
回到顶部
# CAN FD基础知识 随着车辆ECU的数量不断增多,总线上传输的报文数量也越来越多,而在传统CAN网络中,每帧报文只能携带8个字节的数据,CAN总线最大只能支持1Mb/s的传输速率,为了增加CAN总线的利用率,在CAN的基础上推出了CAN FD(Flexible Data-rate)标准。 CAN FD相较于传统CAN,支持更高的传输数率,并且支持变速功能,即在仲裁段使用较低的传输数率进行总线仲裁,赢得仲裁后,再以高速率传输数据段中的数据,最高支持8Mb/s的传输速率,CAN FD的数据场长度也得到了扩充,一次最大可传输64个字节。 在硬件方面的改动相对较小,若是ECU自身的CAN控制器与CAN收发器支持CAN FD功能,硬件方面则不需要作任何修改。 在通信协议方面发生了一定的变动,CAN FD消息帧包括CAN FD标准帧和CAN FD扩展帧,取消了远程帧功能。 ## 一.CAN FD消息帧<a name="CAN FD消息帧"></a> CAN FD报文具体结构如图1-1,1-2所示。 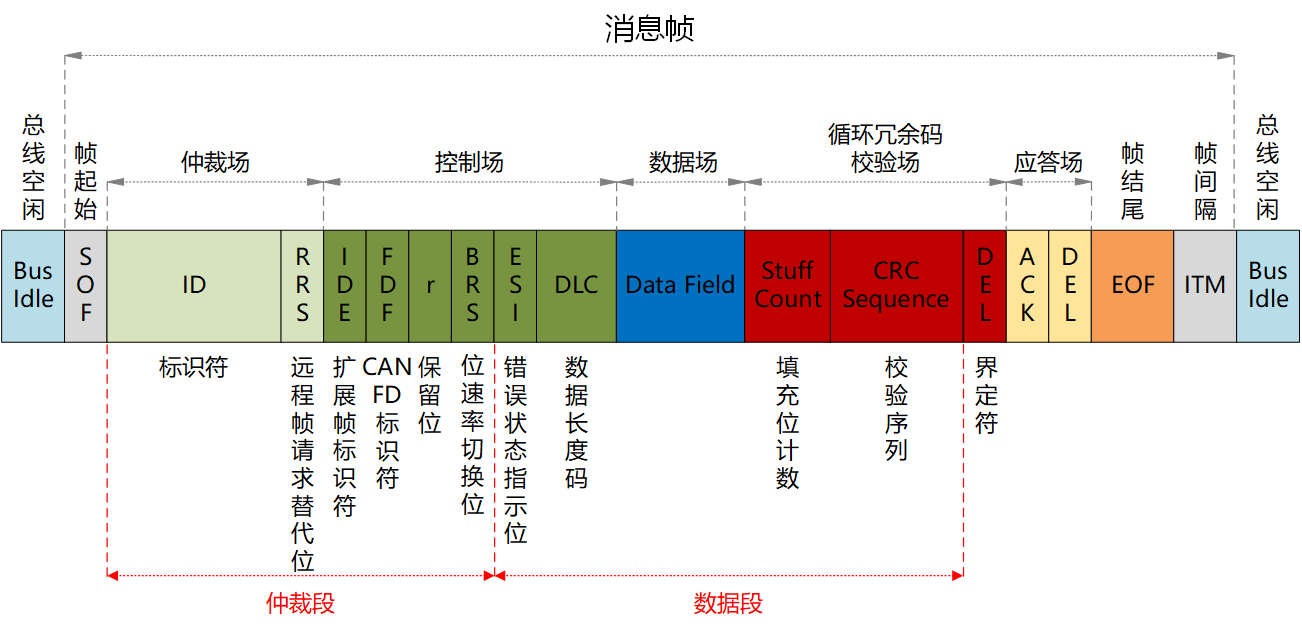 <center> 图1-1 CANFD 标准帧格式 </center> 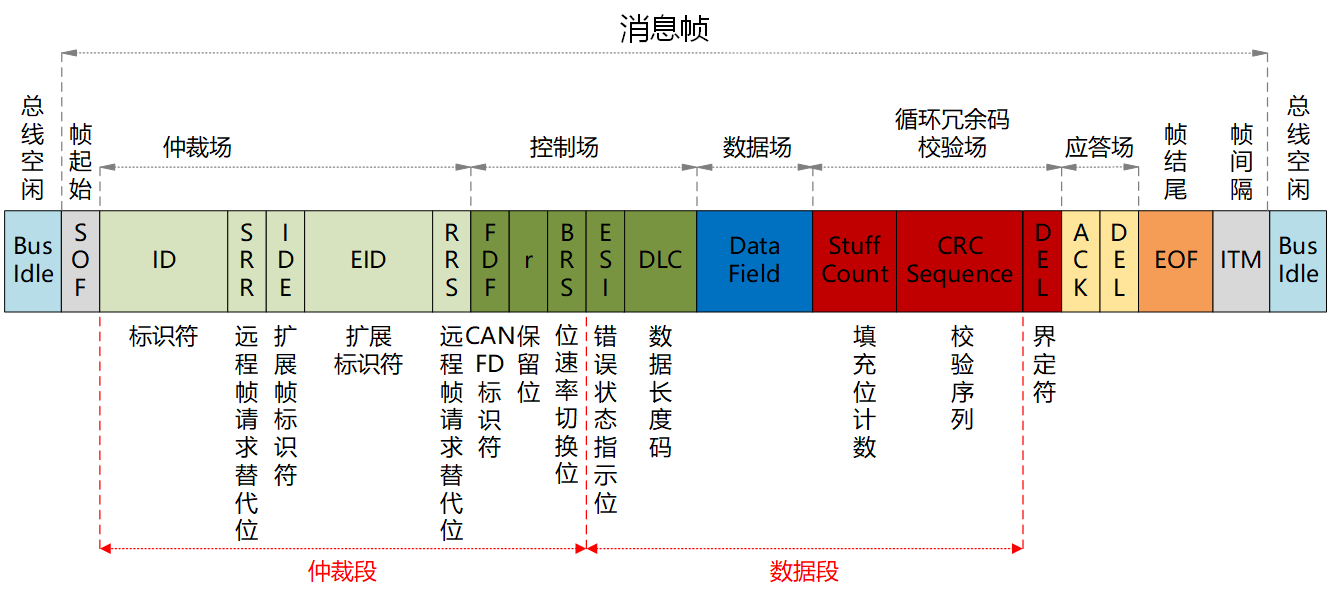 <center>图1-2 CANFD 扩展帧格式</center> 帧起始(SOF):长度1bit,表示数据帧的开始,总线上表现为一个显性位边沿信号,与传统CAN相同。 仲裁场:在标准帧格式中,由11位标识符和RRS位组成,在扩展帧格式中,由29位标识符和SRR位、IDE位、RRS位组成,ID值越小,优先级越高。 - RRS:长度1bit,远程请求替代位,因为CANFD取消了远程帧,所以这个一帧成为了保留位,默认显性位0。 - IDE:长度1bit,表示标识符扩展位,0表示标准帧,1表示扩展帧,与传统CAN相同。 - FDF:长度1bit,CANFD标志位,该位值为0时,代表传统CAN报文,该位值为1时,代表CANFD报文。 - SRR:长度1bit,在扩展帧格式中始终设定为隐性位1,与传统CAN相同。 控制场:由保留位和DLC组成,在标准帧格式中,IDE与保留位相同为显性位0。 - r:长度1bit,保留位。 - BRS:长度1bit,位速率切换位,当该位为0时,表示CANFD报文保持恒定速率传输,当该位为1时,数据段的传输速率将切换至高速率模式。 - ESI:长度1bit,错误状态指示位,当该位为0时,表示当前发送节点处于主动错误状态,当该为为1时,表示当前发送节点处于被动错误状态。 - DLC:长度4bit,数据长度码,当数据在0-8的范围内,数据场场的长度就是对应的数值,当该值在9~15的范围内,对应的数据场长度如表1-1所示: | DLC | 9(0x9) | 10(0xA) | 11(0xB) | 12(0xC) | 13(0xD) | 14(0xE) | 15(0xF) | | ---- | ------- | ------- | ------- | ------- | ------- | ------- | ------- | | 数据长度 | 12Bytes | 16Bytes | 20Bytes | 24Bytes | 32Bytes | 48Bytes | 64Bytes | <cneter> </cneter> <center> 表1-1 DLC对应数据场长度 </center> 数据场(Data Field):0~64个字节,用于节点之间传递有效数据。 CRC场:长度22bit或者26bit,包括Stuff Count,CRC序列和CRC界定符,用于校验数据的准确性,由于CAN FD数据场长度的不确定性,CAN FD会根据不同的数据场长度,使用不同的CRC校验公式。 - Stuff Count:长度4bit,填充位计数,SOF~Data Field的填充位个数,进行模8运算,并以格雷编码形式(Gray Coded),存放在前高3位中,最后一位(Parity Bit)用奇偶校验,如下表所示。 | Number of Stuff Bits | Gray Coded | Parity Bit | |:--------------------:|:----------:|:----------:| | 0 | 000 | 0 | | 1 | 001 | 1 | | 2 | 011 | 0 | | 3 | 010 | 1 | | 4 | 110 | 0 | | 5 | 111 | 1 | | 6 | 101 | 0 | | 7 | 100 | 1 | - CRC Sequence:长度17bit或者21bit,校验序列,当数据场长度≤16字节时,使用17位的校验序列,当数据场长度>16字节时,使用21位的校验序列,与传统CAN不同,CAN FD会将校验场之前的动态填充位也计算在内。 - DEL:长度1bit,隐性界定符,与传统CAN相同。 应答场:长度2bit,由应答间隙和应答界定符组成,与传统CAN相同。 - ACK:发送方将发送隐性位1,由节点应答则返回一个隐性位0,否则保持隐性位1,与传统CAN相同。 帧结尾(EOF):长度7bit,由7个连续的隐性位组成,表示帧结束,与传统CAN相同。 ## 二.CAN FD位填充<a name="CAN FD位填充"></a> CAN FD拥有两种位填充方式,CRC场之前,即从SOF到Data Field最后一个字节与传统CAN的填充方式相同,当检测到发送位中5个极性相同的连续位时,将自动插入一个极性相反的填充位,而CRC场则采用了固定位置的位填充方式,每4个位后增加一个前一位的极性相反位作为填充位,CRC场的填充位如图2-1所示: 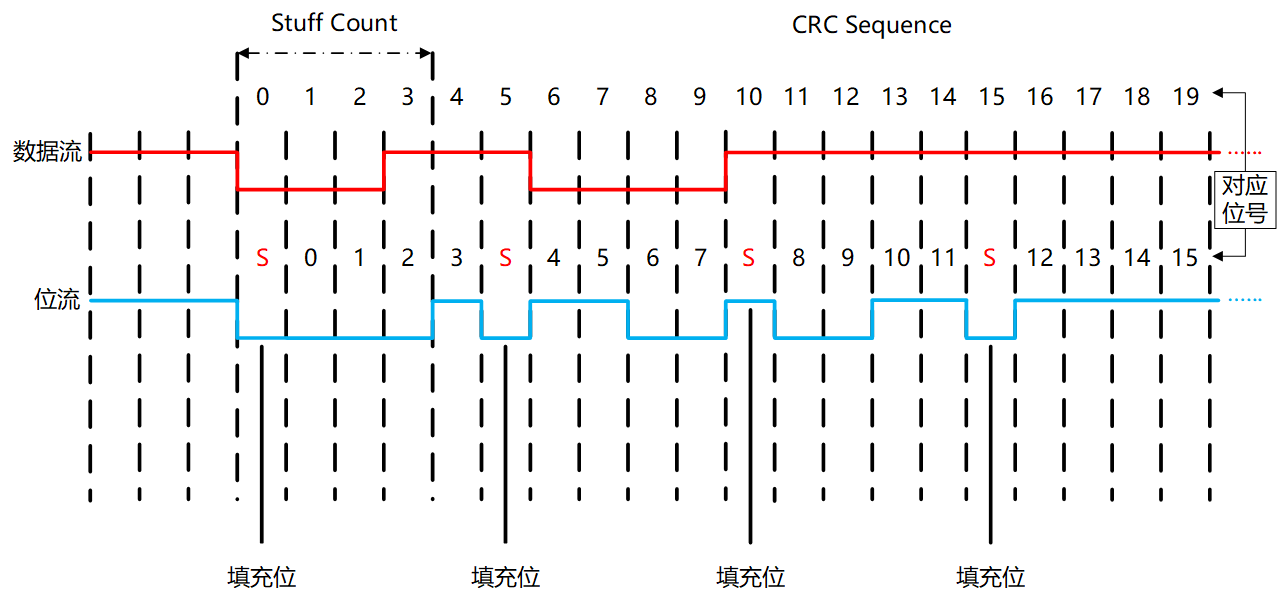 <center>图2-1 CAN FD 填充位</center> 17位的校验序列的对应多项式: G(x)=x<sup>17</sup>+x<sup>16</sup>+x<sup>14</sup>+x<sup>13</sup>+x<sup>11</sup>+x<sup>8</sup>+x<sup>4</sup>+x<sup>3</sup>+x<sup>1</sup>+1,即11 0110 1001 0001 1011。 21位的校验序列的对应多项式: G(x)=x<sup>21</sup>+x<sup>20</sup>+x<sup>13</sup>+x<sup>11</sup>+x<sup>7</sup>+x<sup>4</sup>+x<sup>3</sup>+1,即11 0000 0010 1000 1001 1001。 ## 三.CAN FD与传统CAN的区别<a name="CAN FD与传统CAN的区别"></a> 1. 波特率 传统CAN最高支持1Mb/s的传输速率,CAN FD仲裁段支持的最高传输速率与传统CAN相同,为1Mb/s,数据段最高支持8Mb/s的传输速率。 2. 波特率加速 传统CAN的一帧报文是以相同速率进行传输的,而CAN FD可以通过设置BRS(位速率切换位),将仲裁段与数据段分为两种速率进行报文传输,在仲裁段使用较低的传输数率进行总线仲裁,赢得仲裁后,再以高速率传输数据段中的数据。 3. 数据场 传统CAN每帧报文最大只能传输8个字节的数据,CAN FD最大可以一次传输64个字节。 4. 远程帧 传统CAN支持远程帧功能,CAN FD则取消了远程帧功能。 ## 四.使用控制器收发CAN FD报文<a name="使用控制器收发CAN FD报文"></a> RapidECU有些型号提供了若干CAN FD通道,比如RapidECU-U34控制器提供了6个CAN FD通道,其它型号控制器类似。使用带CAN FD通道的控制器可以收发CAN FD报文。ECUCoder提供了CANFDCommucation CANFD通信模块库,库中的模块用于收发CAN FD报文。 本文示例使用RapidECU - U34控制器演示,使用周立功USBCANFD 200U配合ZCANPRO与U34控制器进行通信。 ### 4.1.CAN FD模块初始化设置<a name="CAN FD模块初始化设置"></a> 双击RapidECUSetting模块,出现控制器设置图形化界面,从左边的树中选择Communication-CAN0选项,如图4.1-1所示。开启CAN FD功能,仲裁域波特率为500kbps,数据域波特率为2Mbps,一帧CAN FD报文允许的数据场最大长度为16个字节。 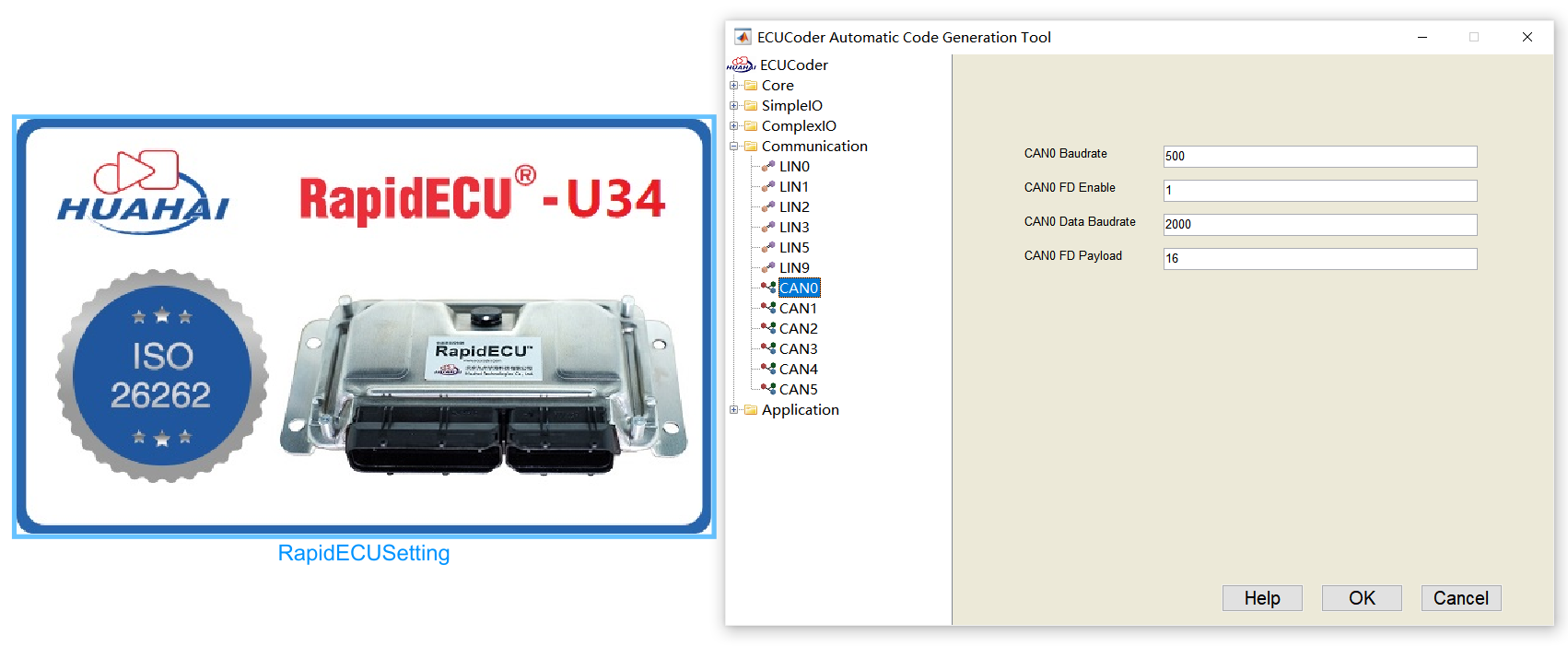 <center> 图4.1-1 CAN FD初始化设置 </center> 控制器的CAN通道波特率(CAN Baudrate)默认设置为500kbps,如果CAN总线波特率为其它数值,则需要修改 Baudrate的值,可供设定的范围为:1000、500、250、125,对应1Mbps、500kbps、250kbps、125Kbps,如果填写其他数值,控制器则自动设定为500。 CAN FD Enable默认设置为0,控制器默认不开启CAN FD功能,将CAN FD Enable设为1,开启CAN FD功能。 若发送与接收CAN FD消息帧,仲裁域与数据域速率相同,均采用Baudrate设定的波特率;若发送与接收CAN FD加速帧,仲裁域仍采用Baudrate设定的波特率,数据域则采用Data Baudrate设定的波特率。Data Baudrate默认设置为2000,即2Mbps。Data Baudrate可供设定的范围为:4000、2000、1000、500、250、125,对应4Mbps、2Mbps、1Mbps、500kbps、250kbps、125kbps。如果填写其他数值,控制器则自动设定为500。 FD Payload为数据场最大负载,请按照CAN FD总线协议中数据场最长的报文设定,可供设定的范围为8,16,32,64,如果填写其他数值,控制器则自动设定为8。 ### 4.2.发送CAN FD报文<a name="发送CAN FD报文"></a> 请根据实际的通信协议建立时间调度,周期性发送CAN FD报文,本示例每100ms发送一帧CAN FD报文,如图4.2-1所示。 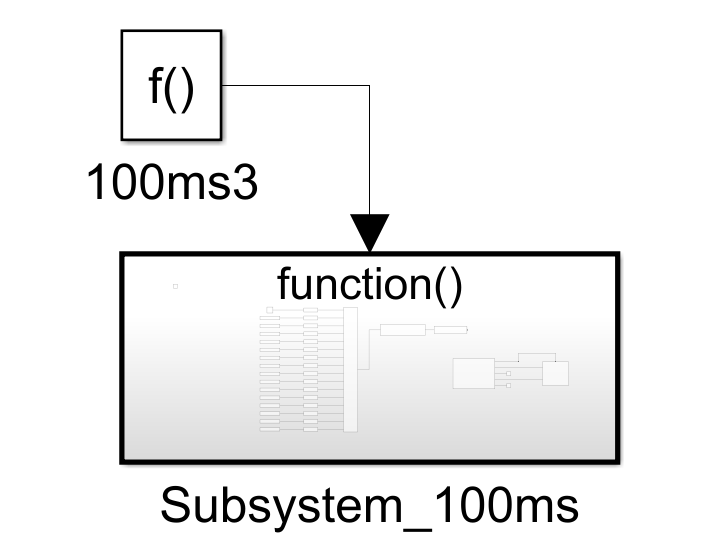 <center> 图4.2-1 100ms时间调度 </center> 在Subsystem_100ms中建立发送CAN FD报文的模型,根据初始化设置中的FD Payload值选择对应的CAN FD子库,即FD Payload设定16,则选用Max16Bytes子库中的发送模块(M16CAN0to2Transmit),进行必要的设置,如图4.2-2所示。  <center> 图4.2-2 发送CAN FD报文 </center> - CAN Module选择CAN0通道发送报文; - CAN Buffer选择为5号缓存区,同一路CAN通道的收发不允许使用同一块缓存区; - CAN Message ID 为0x41; - CAN Message Types为标准帧格式; - CAN Type为CAN FD加速帧; - Data Length为数据场长度16Bytes。 ### 4.3.定时接收指定ID的CAN FD报文<a name="定时接收指定ID的CAN FD报文"></a> 请根据实际的通信协议建立时间调度,周期性接收CAN FD报文,本案例每100ms接收一帧CAN FD报文,在Subsystem_100ms中建立接收CAN FD报文的模型。 根据初始化设置中的FD Payload的值选择对应的CAN FD子库,FD Payload设定16,则选用Max16Bytes子库中的接收模块(M16CAN0to2Receive),进行必要的设置,如图4.3-1所示。 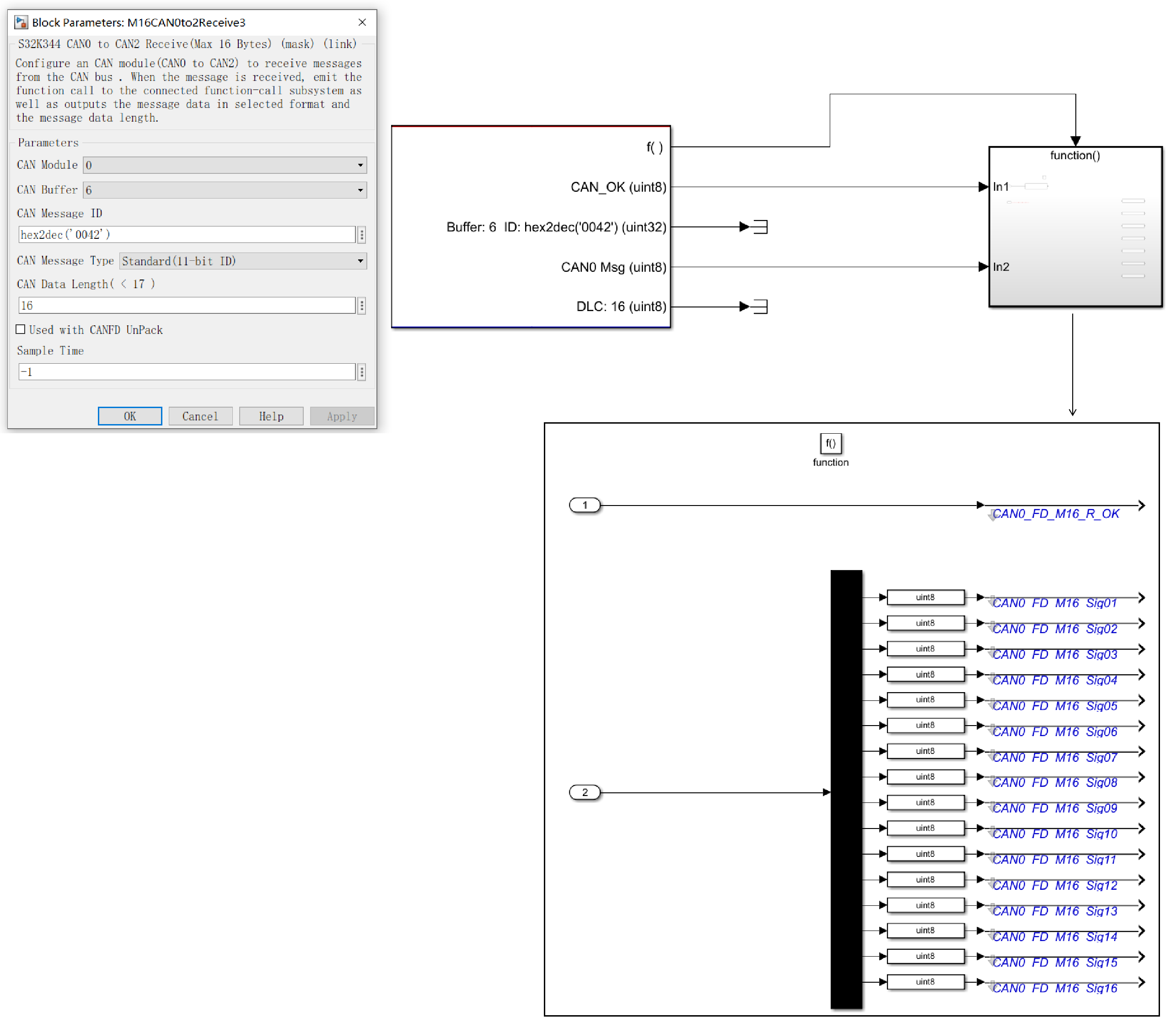 <center> 图4.3-1 定时接收指定ID的CAN FD报文 </center> - CAN Module选择CAN0通道发送报文; - CAN Buffer选择为6号缓存区,同一路CAN通道的收发不允许使用同一块缓存区; - CAN Message ID 为0x42; - CAN Message Types为标准帧格式; - Data Length为数据场长度16Bytes。 ### 4.4.CAN FD通信演示<a name="CAN FD通信演示"></a> 连接PC与控制器,将上述模型烧录至控制器,打开ZCANPRO,建立连接,选择CAN卡(USBCANFD - 200U),协议CAN FD,开启CAN FD加速,仲裁域波特率500kbps,数据域波特率2Mbps与控制器初始化设定中对应。如图4.4-1所示。 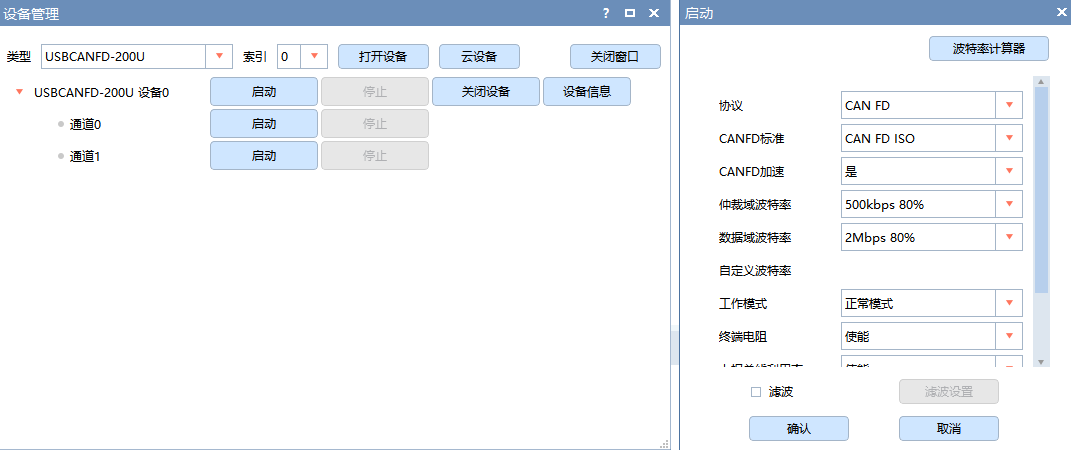 <center> 图4.4-1 PC与控制器建立连接 </center> 控制器端发送报文ID0x41,接收报文ID0x42;PC端接收报文ID0x41,发送报文ID0x42。查看MeCa与ZCANPRO软件,收发正常,如图4.4-2所示。 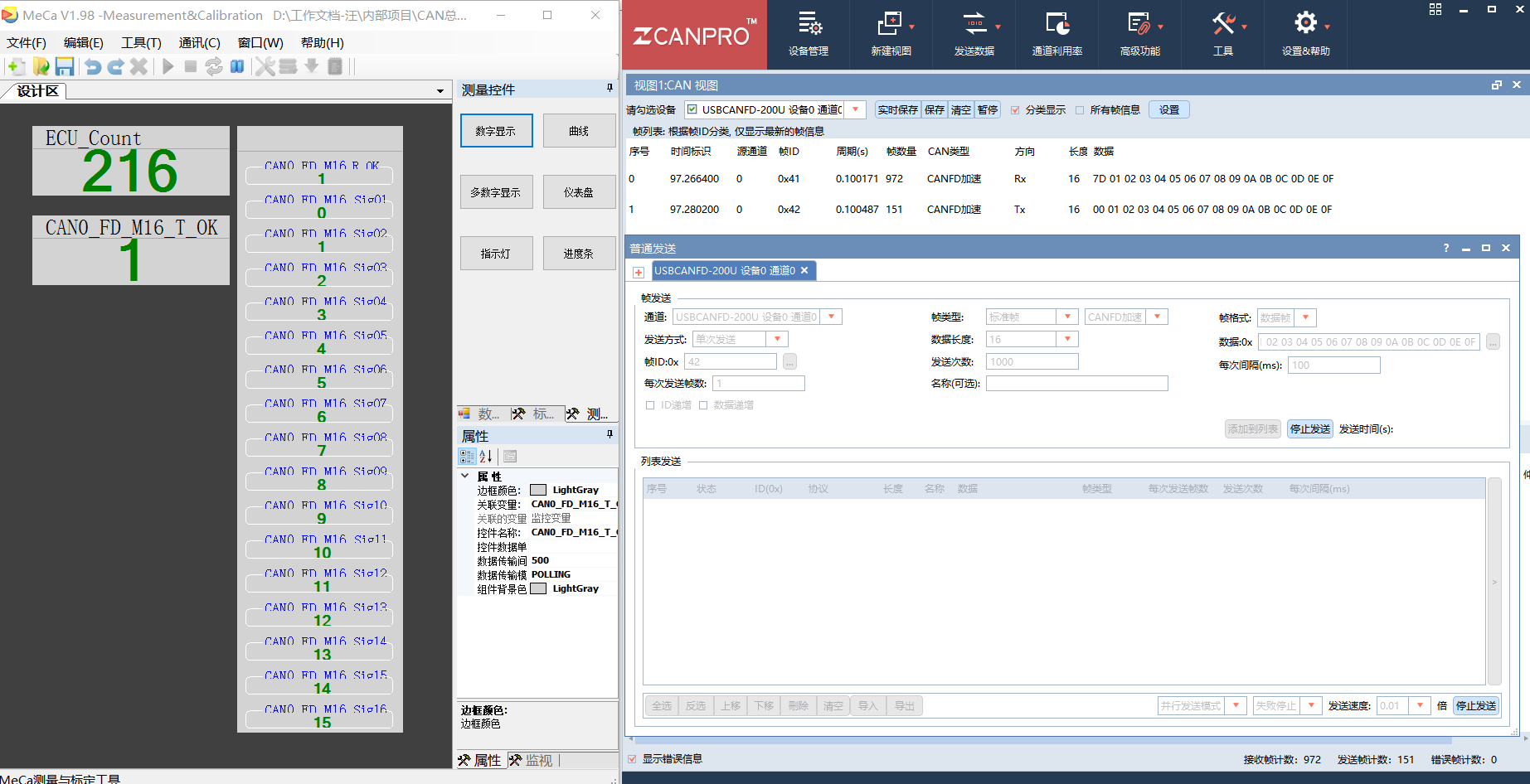 <center> 图4.4-2 PC与控制器进行CAN FD通信 </center> ## 五.CAN FD的兼容性<a name="CAN FD的兼容性"></a> ### 5.1.ISO CAN FD与non-ISO CAN FD的兼容性<a name="ISO CAN FD与non-ISO CAN FD的兼容性"></a> CAN FD的ISO标准是2015年发布的,而CAN FD是在2012年推出的,2012年底到2015年中之前有很多厂家已经开发了CAN FD产品,但是那个是非ISO标准的CAN FD产品,并且已经有少部分产品已经在市场流通。 非ISO CAN FD与 ISO CAN FD的共同点在于:传输速率一致,数据长度一致;区别在于:后者引入了一个3位的填充位计数器以及额外的校验位,另外,CRC计算值也不同。所以两者是不兼容的。因此CiA建议所有的CAN FD应用需注明ISO CAN FD或non-ISO CAN FD。 2015年之后推出的CAN FD产品基本都是符合ISO标准的CAN FD产品,有些产品则同时支持ISO CAN FD与non-ISO CAN FD,用户只需要在软件上选择使用即可。 ### 5.2.CAN FD与传统CAN的兼容性<a name="CAN FD与传统CAN的兼容性"></a> CAN FD节点可以发送CAN FD报文与传统CAN报文,CAN FD节点可以接收CAN FD报文与传统CAN报文,因此,通常说法是CAN FD兼容传统CAN。 传统CAN节点只能发送传统CAN报文而不能发送CAN FD报文,传统CAN节点只能接收传统CAN报文而不能接收CAN FD报文。在大部分情况下,如果传统CAN总线上添加了一个CAN FD节点并往总线上发送CAN FD报文的话,会出现错误帧。 在实际应用中,很长一段时间内都会有CAN FD节点与CAN节点共存于同一辆车上的情况。此时,推荐的做法是CAN FD节点与传统CAN节点分别组网,两路总线之间通过网关来交换信息。比如RapidECU-U34控制器提供了6个CAN FD通道,每个通道均支持CAN FD或者传统CAN,此时U34控制器就可以作为网关来使用。 ## 六.CAN FD的前景<a name="CAN FD的前景"></a> 1. 2020年后推出的主流微控制器均由传统CAN升级到了CAN FD,比如恩智浦、英飞凌、意法等的新微控制器产品均支持CAN FD。 2. 2021年后推出的主流电控单元ECU均由传统CAN升级到了CAN FD,比如RapidECU-U34、F23等产品均支持CAN FD。 3. CAN FD产品在成本与售价上相比传统CAN产品并无明显区别。 4. CAN FD在部分性能(比如传输速率)上远超传统CAN,在另外部分性能(比如传输可靠性)上与传统CAN一致。 5. CAN FD兼容CAN,用户可以把CAN FD当成传统CAN来使用。 6. MATLAB/Simulink 2019a及以上版本提供了完整的CAN FD功能支持,Simulink提供的CAN FD相关模块既可以仿真,也可以生成C代码。 综上,CAN FD应用前景广阔,是传统CAN总线升级换代的理想选择。