CAN/CANFD
CCP/UDS
Bootloader/OTA
ECU/VCU/FCU
Simulink/ECUCoder
Ethernet
Hardware
Download
上一篇
下一篇
第一个可在控制器中运行的模型
一.示例说明
-1.1.示例软件开发环境
-1.2.示例使用的控制器
-1.3.示例功能说明
-1.4.示例前置条件
-1.5.示例文件下载
二.示例模型建模过程
三.示例模型的使用
四.示例小结
回到顶部
第一个可在控制器中运行的模型
一.示例说明
-1.1.示例软件开发环境
-1.2.示例使用的控制器
-1.3.示例功能说明
-1.4.示例前置条件
-1.5.示例文件下载
二.示例模型建模过程
三.示例模型的使用
四.示例小结
回到顶部
# 第一个可在控制器中运行的模型 ## 一.示例说明<a name="示例说明"></a> ### 1.1.示例软件开发环境<a name="示例软件开发环境"></a> MATLAB版本:MATLAB R2019a VS版本:VS2015 S32DS版本:S32DS for S32 Platform 3.5 ECUCoder版本:ECUCoder for S32K344V1.3D或者ECUCoder for S32K311V1.3D MeCa版本:MeCa2.0 关于以上软件开发环境,请参考本站《[电控开发环境搭建手册](./build.html)》。 ### 1.2.示例使用的控制器<a name="示例使用的控制器"></a> 本示例使用的控制器型号为RapidECU-U34,关于RapidECU-U34控制器的具体信息,请参考本站《[U34控制器硬件参考手册](./u34.html)》。 控制器接线:因为本示例只需要使用最基本的控制器功能,因此控制器接线参考了《[U34控制器硬件参考手册](./u34.html)》中的硬件最小系统接线图,如下图所示。因为本示例未使用到控制器的任何功率驱动管脚,因此可以不接主继电器,控制器的99#、116#、121#管脚可以悬空处理。控制器的25#管脚只在需要进入Bootloader修复模式时才短接到地,平时悬空即可。 控制器的标定CAN总线通过DB9连接器连接到ZLG USBCAN卡的CAN1接口,其中50#管脚为CAN低,69#管脚为CAN高,CAN低与CAN高不可接反,否则无法建立通信。标定CAN总线必须使用双绞线,双绞线靠近CAN卡处需要并联一个120欧姆左右的终端电阻以保证标定CAN通信稳定可靠。 U34控制器的标定CAN内部已经并联了一个120欧姆左右的终端电阻,因此,在标定CAN总线正确连接之后,标定CAN总线的CAN低与CAN高之间的电阻值应为60~70欧姆,此电阻值需要使用万用表测量确认,如果电阻值不在此范围内,请检查并修复线束。 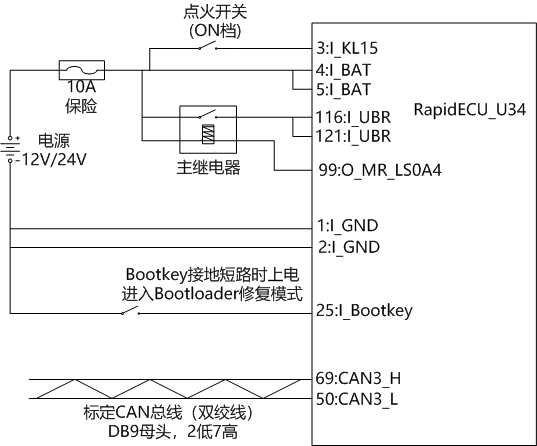 推荐使用带电压电流显示功能与限流保护功能的小型可调直流电源,电源电压可调节为12V或者24V左右,电流限制值可调节为1A左右,这样即使线路存在短路故障也不会产生很大冲击电流。如果使用的是车载电瓶或者大功率直流电源的话,上图中的10A保险是必须接的,否则一旦线路存在短路故障将导致线路烧毁甚至起火爆炸。 按照以上接线(不接主继电器,99#、116#、121#管脚悬空),当点火开关未闭合时,电源电流应小于1mA(大多数电源显示0)。当点火开关闭合时,12V电源的电流大约为90mA左右(70mA-110mA),24V电源的电流大约为45mA左右(35mA-55mA)。如果点火开关闭合时12V电源的电流小于50mA或者24V电源的电流小于30mA,表明控制器供电存在异常,控制器未正常启动。如果点火开关闭合时12V电源的电流大于200mA或者24V电源的电流大于100mA,表明电源线路存在异常,可能存在短路故障。不管电流过小或者过大,都应该立即切断电源,重新检修线束并使用万用表测量确认无短路故障之后再重新上电。 ### 1.3.示例功能说明<a name="示例功能说明"></a> 本示例搭建了第一个可在控制器中运行的模型,模型中并无任何算法,仅仅是为了验证模型可以在控制器中实时运行。 示例模型中包含两个软件计数器,分别是100ms软件计数器与1s软件计数器,100ms软件计数器每隔100ms加一,1s软件计数器每隔1s加一。为了方便观察软件运行状况,将两个软件计数器都做成测量变量,当模型在控制器中运行时,可以使用标定软件观察到这两个软件计数器的值。 虽然示例模型中并无任何算法,但是示例模型可以验证模型是否可以在控制器中实时运行。另外,软件计数器在实际项目中也非常有用,比如作为心跳信号判断控制器运行是否实时,判断控制器是否存在死机、复位等故障。 ### 1.4.示例前置条件<a name="示例前置条件"></a> 本示例要求用户提前搭建好基于模型设计的软件开发环境,请参考本站《[电控开发环境搭建手册](./build.html)》。 本示例操作实践要求有一台RapidECU-U34控制器并且正确接线,请参考本文章节1.2《示例使用的控制器》。 本示例要求用户具备最基本的Simulink/ECUCoder基础知识,请参考本站《[Simulink快速入门](./simulinkstart.html)》、《[ECUCoder快速入门](./ecucoder.html)》。 本示例属于最基础示例,不要求用户具备编程技巧或者建模技巧。如果用户没有ECUCoder的使用经验,可以使用本示例作为第一个入门学习的示例模型。 ### 1.5.示例文件下载<a name="示例文件下载"></a> 用户可以参考本文自行建模而不需要下载示例文件,用户也可以下载示例文件以获取更多参考信息,示例文件下载地址:[示例文件](./download.html)。 ## 二.示例模型建模过程<a name="示例模型建模过程"></a> 示例模型建模过程如下: 1. 新建一个文件夹,名称为DEMO01_FirstModel。 2. 切换MATLAB工作路径到上述新建文件夹的路径,新建一个名为DEMO01_FirstModel的Simulink模型。 3. 点击进入Simulink 的ECUCoder for S32K344模块库(或者ECUCoder for S32K311模块库), 点击RapidECU_U34子库, 选择RapidECUSetting模块,将RapidECUSetting模块拖入到新建的模型中。 4. 在模型中创建一个100ms的任务,任务由100ms模块(位于RapidECU_U34-EasyTask子库)与Function-Call Subsystem模块(位于Simulink-Ports&Subsystem子库)组成。任务中使用CounterLimited模块(位于Simulink-Sources子库)作为软件计数器,设置CounterLimited模块的参数Upper limit为100000。使用MeaModule模块(位于RapidECU_U34-Calibration子库)观察软件计数器的值,模块的信号名称设置为MyCounter_100ms,编译模型的过程中自动将MyCounter_100ms作为测量变量处理,MyCounter_100ms会自动添加到模型编译生成的A2L文件中。 5. 在模型中创建一个1s的任务,任务由1s模块(位于RapidECU_U34-EasyTask子库)与Function-Call Subsystem模块(位于Simulink-Ports&Subsystem子库)组成。任务中使用CounterLimited模块(位于Simulink-Sources子库)作为软件计数器,设置CounterLimited模块的参数Upper limit为10000。使用MeaModule模块(位于RapidECU_U34-Calibration子库)观察软件计数器的值,模块的信号名称设置为MyCounter_1s,编译模型的过程中自动将MyCounter_1s作为测量变量处理,MyCounter_1s会自动添加到模型编译生成的A2L文件中。 建模完成的模型如下图所示: 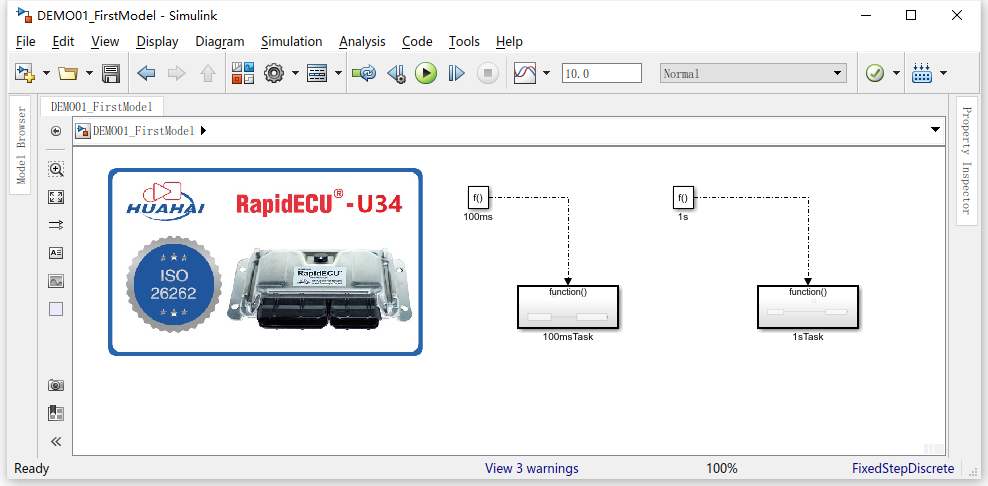 ## 三.示例模型的使用<a name="示例模型的使用"></a> 示例模型使用过程如下: 1. 在配置好的软件开发环境中,切换MATLAB工作路径到DEMO01_FirstModel文件夹,打开模型DEMO01_FirstModel。 2. 点击“Build Model”按钮或者使用快捷键Ctrl+B编译模型。模型编译完成之后,生成DEMO01_FirstModel.s19文件与DEMO01_FirstModel.a2l文件,其中.s19文件用于刷写到控制器内部,.a2l文件用于测量标定。 3. 使用一台RapidECU-U34控制器,控制器接线请参考本文章节1.2《示例使用的控制器》。利用MeCa-UDS Program软件将DEMO01_FirstModel.s19文件刷写到RapidECU-U34控制器中。 4. 使用MeCa软件新建一个名为DEMO01_FirstModel的项目,导入数据库文件时使用DEMO01_FirstModel.a2l文件。项目面板中添加一个“多数字显示”控件,控件关联MyCounter_100ms与MyCounter_1s两个测量变量。 5. 依次点击MeCa软件工具栏中的“建立连接”与“开始同步”按钮,可以观察到MyCounter_100ms与MyCounter_1s两个测量变量的值正在变化,其中变量MyCounter_100ms每0.1秒钟加一,变量MyCounter_1s每秒钟加一。 DEMO01_FirstModel模型正在U34控制器中运行的MeCa软件如下图所示: 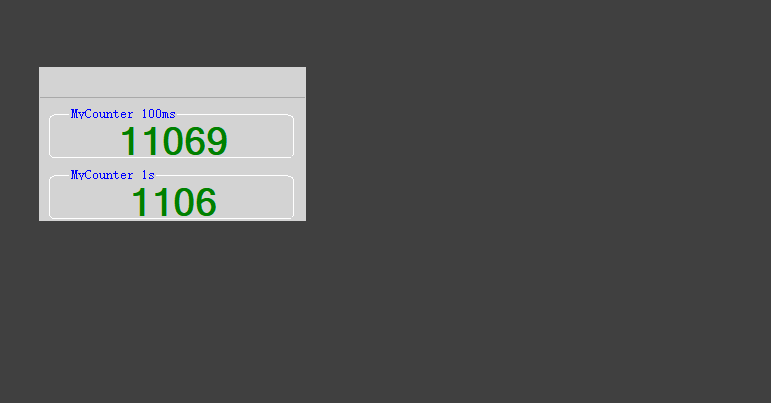 ## 四.示例小结<a name="示例小结"></a> 示例模型DEMO01_FirstModel搭建了第一个可在控制器中运行的模型,通过学习本示例并操作实践,用户可以学习到: 1. 如何利用基于模型设计的软件开发环境搭建第一个简单可运行的模型。 2. 如何编译模型并将模型刷写到控制器硬件中运行。 3. 如何使用标定软件创建一个标定项目并观察模型在控制器中的运行状况。