CAN/CANFD
CCP/UDS
Bootloader/OTA
ECU/VCU/FCU
Simulink/ECUCoder
Ethernet
Hardware
Download
上一篇
下一篇
读取加速度传感器的相关信息
一.示例说明
-1.1.示例软件开发环境
-1.2.示例使用的控制器
-1.3.示例功能说明
-1.4.示例前置条件
-1.5.示例文件下载
二.示例模型建模过程
三.示例模型的使用
四.示例小结
回到顶部
读取加速度传感器的相关信息
一.示例说明
-1.1.示例软件开发环境
-1.2.示例使用的控制器
-1.3.示例功能说明
-1.4.示例前置条件
-1.5.示例文件下载
二.示例模型建模过程
三.示例模型的使用
四.示例小结
回到顶部
# 读取加速度传感器的相关信息 ## 一.示例说明<a name="示例说明"></a> ### 1.1.示例软件开发环境<a name="示例软件开发环境"></a> MATLAB版本:MATLAB R2019a VS版本:VS2015 S32DS版本:S32DS for S32 Platform 3.5 ECUCoder版本:ECUCoder for S32K344V1.3D或者ECUCoder for S32K311V1.3D MeCa版本:MeCa2.0 关于以上软件开发环境,请参考本站《[电控开发环境搭建手册](./build.html)》。 ### 1.2.示例使用的控制器<a name="示例使用的控制器"></a> 本示例使用的控制器型号为RapidECU-U34A/RapidECU-U34LA,关于RapidECU-U34控制器的具体信息,请参考本站《[U34控制器硬件参考手册](./u34.html)》。需要注意的是,U34控制器标准型号是不支持加速度传感器IMU模块的,只有选配了加速度传感器的U34A/U34LA才支持加速度传感器。 控制器接线:因为本示例只需要使用最基本的控制器功能,因此控制器接线参考了《[U34控制器硬件参考手册](./u34.html)》中的硬件最小系统接线图,如下图所示。因为本示例未使用到控制器的任何功率驱动管脚,因此可以不接主继电器,控制器的99#、116#、121#管脚可以悬空处理。控制器的25#管脚只在需要进入Bootloader修复模式时才短接到地,平时悬空即可。 控制器的标定CAN总线通过DB9连接器连接到ZLG USBCAN卡的CAN1接口,其中50#管脚为CAN低,69#管脚为CAN高,CAN低与CAN高不可接反,否则无法建立通信。标定CAN总线必须使用双绞线,双绞线靠近CAN卡处需要并联一个120欧姆左右的终端电阻以保证标定CAN通信稳定可靠。 控制器的标定CAN内部已经并联了一个120欧姆左右的终端电阻,因此,在标定CAN总线正确连接之后,标定CAN总线的CAN低与CAN高之间的电阻值应为60~70欧姆,此电阻值需要使用万用表测量确认,如果电阻值不在此范围内,请检查并修复线束。 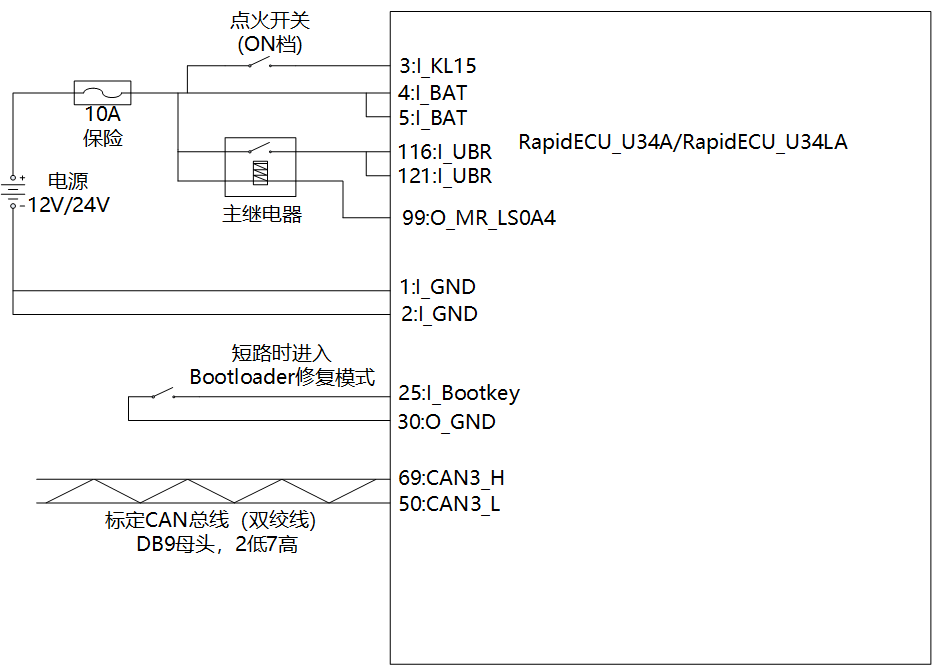 推荐使用带电压电流显示功能与限流保护功能的小型可调直流电源,电源电压可调节为12V或者24V左右,电流限制值可调节为1A左右,这样即使线路存在短路故障也不会产生很大冲击电流。如果使用的是车载电瓶或者大功率直流电源的话,上图中的10A保险是必须接的,否则一旦线路存在短路故障将导致线路烧毁甚至起火爆炸。 按照以上接线(不接主继电器,99#、116#、121#管脚悬空),当点火开关未闭合时,电源电流应小于1mA(大多数电源显示0)。当点火开关闭合时,12V电源的电流大约为90mA左右(70mA-110mA),24V电源的电流大约为45mA左右(35mA-55mA)。如果点火开关闭合时12V电源的电流小于50mA或者24V电源的电流小于30mA,表明控制器供电存在异常,控制器未正常启动。如果点火开关闭合时12V电源的电流大于200mA或者24V电源的电流大于100mA,表明电源线路存在异常,可能存在短路故障。不管电流过小或者过大,都应该立即切断电源,重新检修线束并使用万用表测量确认无短路故障之后再重新上电。 ### 1.3.示例功能说明<a name="示例功能说明"></a> 本示例在[第一个可在控制器中运行的模型](./demo01.html)DEMO01_FirstModel的基础上,添加了读取加速度传感器信息的模块。 示例模型中包含两个软件计数器,分别是100ms软件计数器与1s软件计数器,可以使用标定软件观察到这两个软件计数器的值。模型中包含一个标记模型软件版本的常量,可以使用标定软件观察到这个软件版本常量的值。 模型顶层添加了IMUEnable模块,模型100ms任务中包含了三轴加速度模块、三轴角速度模块和姿态角模块,可以实时读取三轴加速度、三轴角速度和姿态角等相关信息。 ### 1.4.示例前置条件<a name="示例前置条件"></a> 本示例要求用户提前搭建好基于模型设计的软件开发环境,请参考本站《[电控开发环境搭建手册](./build.html)》。 本示例操作实践要求有一台RapidECU-U34A/U34LA控制器并且正确接线,请参考本文章节1.2《示例使用的控制器》。 本示例属于基础示例,要求用户具备Simulink/ECUCoder建模技能。如果用户还没有Simulink/ECUCoder的使用经验,建议从《[第一个可在控制器中运行的模型](./demo01.html)》开始顺序学习。 ### 1.5.示例文件下载<a name="示例文件下载"></a> 用户可以参考本文自行建模而不需要下载示例文件,用户也可以下载示例文件以获取更多参考信息,示例文件下载地址:[示例文件](./download.html)。 ## 二.示例模型建模过程<a name="示例模型建模过程"></a> 示例模型建模过程如下: 1. 新建一个文件夹,名称为DEMO19_ReadIMU。 2. 切换MATLAB工作路径到上述新建文件夹的路径,新建一个名为DEMO19_ReadIMU的Simulink模型。 3. 点击进入Simulink 的ECUCoder for S32K344模块库(或者ECUCoder for S32K311模块库), 点击RapidECU_U34子库, 选择RapidECUSetting模块,将RapidECUSetting模块拖入到新建的模型中。 4. 在模型中创建一个100ms的任务,任务中添加一个名为MyCounter_100ms的软件计数器。在模型中创建一个1s的任务,任务中添加一个名为MyCounter_1s的软件计数器。此步骤与《[第一个可在控制器中运行的模型](./demo01.html)》的建模步骤相同。为了管理模型的软件版本,在1s任务中添加一个Constant模块,将模块的值设置为23111615(年月日小时设置法)。此步骤与《[为模型添加测量变量与标定变量](./demo02.html)》的建模步骤相同。 5. 为了演示读取加速度传感器的信号,点击RapidECU_U34模型库,点击IMU 子库,将IMUEnable拖入模型顶层,双击该模块,勾选IMU Enable,启用IMU功能。 6. 将Accelerometer、Gyroscope、Attitude拖入到100ms任务中,添加测量模块MeaModule,用于监测三轴加速度模块、三轴角速度模块和姿态角的信号状态与当前信号值。 建模完成的100ms任务模型如下图所示: 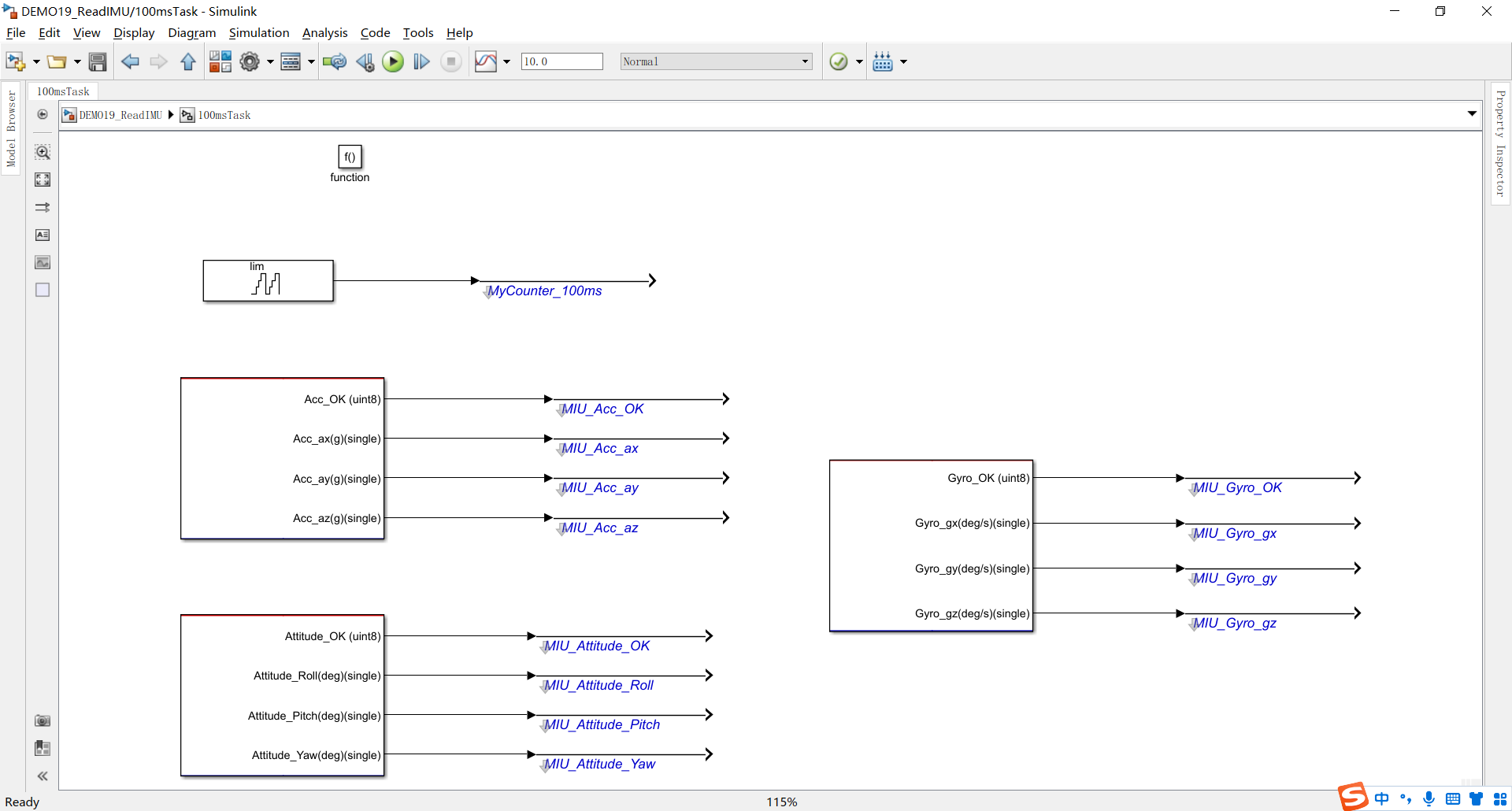 ## 三.示例模型的使用<a name="示例模型的使用"></a> 示例模型使用过程如下: 1. 在配置好的软件开发环境中,切换MATLAB工作路径到DEMO19_ReadIMU文件夹,打开模型DEMO19_ReadIMU。 2. 点击“Build Model”按钮或者使用快捷键Ctrl+B编译模型。模型编译完成之后,生成DEMO19_ReadIMU.s19文件与DEMO19_ReadIMU.a2l文件,其中.s19文件用于刷写到控制器内部,.a2l文件用于测量标定。 3. 使用一台RapidECU-U34A/LA控制器,控制器接线请参考本文章节1.2《示例使用的控制器》。利用MeCa-UDS Program软件将DEMO19_ReadIMU.s19文件刷写到RapidECU-U34控制器中。 4. 使用MeCa软件新建一个名为DEMO19_ReadIMU的项目,导入数据库文件时使用DEMO19_ReadIMU.a2l文件。项目面板中添加“多数字显示”控件,控件关联A2L文件中所有测量变量。 5. 依次点击MeCa软件工具栏中的“建立连接”与“开始同步”按钮,可以观察到模型中测量变量的值正在变化,其中变量MyCounter_1s每秒钟加一。 6. 上电后,查看加速度传感器返回的信号,调整控制器角度,信号发生明显变化。 DEMO19_ReadIMU模型正在U34控制器中运行的MeCa软件如下图所示: 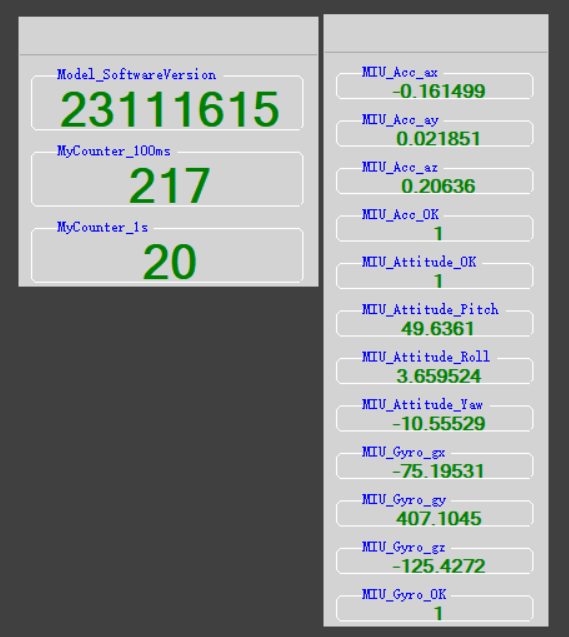 控制器可以正确读取加速度传感器的相关信息,模型运行符合设计预期。 ## 四.示例小结<a name="示例小结"></a> 示例模型DEMO19_ReadIMU演示了读取加速度传感器的相关信息,通过学习本示例并操作实践,用户可以学习到: 1. 如何在模型中添加IMU相关模块。 2. 如何实时读取加速度传感器的相关信息。 关于控制器加速度传感器IMU模块的使用说明,请参考ECUCoder软件文档《IMU模块使用说明书》。