CAN/CANFD
CCP/UDS
Bootloader/OTA
ECU/VCU/FCU
Simulink/ECUCoder
Ethernet
Hardware
Download
上一篇
下一篇
F23控制器硬件参考手册
一.F23控制器简介
二.F23控制器硬件框图
三.硬件技术规格表
四.管脚列表(按管脚顺序)
五.管脚列表(按功能模块)
-1.电源类管脚
-2.输入类管脚
-3.输出类管脚
-4.通信类管脚
六.接插件示意图
七.硬件最小系统接线图
八.外形尺寸图
九.电路原理示意图
-1.控制器激活信号
-2.高有效开关量输入
-3.低有效开关量输入
-4.模拟量输入_下拉型
-5.模拟量输入_上拉型
-6.PWM信号输入
-7.PeakHold功率驱动
-8.低端功率驱动
-9.高端功率驱动
-10.H桥驱动
十.F23控制器选型表
十一.使用注意事项
回到顶部
F23控制器硬件参考手册
一.F23控制器简介
二.F23控制器硬件框图
三.硬件技术规格表
四.管脚列表(按管脚顺序)
五.管脚列表(按功能模块)
-1.电源类管脚
-2.输入类管脚
-3.输出类管脚
-4.通信类管脚
六.接插件示意图
七.硬件最小系统接线图
八.外形尺寸图
九.电路原理示意图
-1.控制器激活信号
-2.高有效开关量输入
-3.低有效开关量输入
-4.模拟量输入_下拉型
-5.模拟量输入_上拉型
-6.PWM信号输入
-7.PeakHold功率驱动
-8.低端功率驱动
-9.高端功率驱动
-10.H桥驱动
十.F23控制器选型表
十一.使用注意事项
回到顶部
# RapidECU-F23控制器硬件参考手册 ## 一.F23控制器简介<a name="F23控制器简介"></a> RapidECU-F23是全新一代燃料电池系统控制器,支持燃料电池发动机管理系统控制单元,氢气管理系统控制单元,进气管理系统控制单元,热管理系统控制单元等的控制器快速原型开发与批量配套。RapidECU-F23是华海科技燃料电池系统控制器的第三代产品,整个产品的定义、设计与验证均参考ISO26262标准进行。  ## 二.F23控制器硬件框图<a name="F23控制器硬件框图"></a> 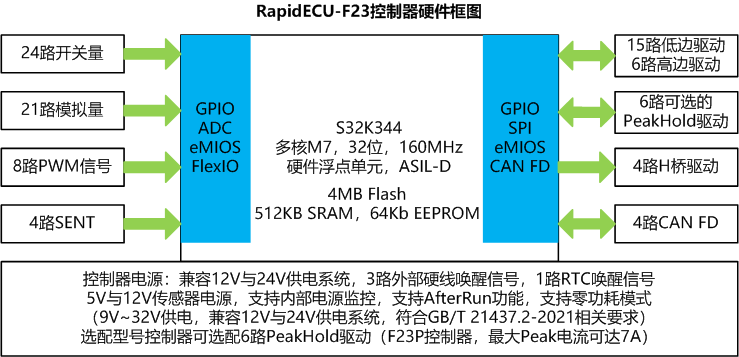 | 技术规格 | 描述 | | ---- | ------------------------------------------------ | | 供电电压 | 正常工作电压9V~32V | | 唤醒信号 | 3路外部硬线唤醒信号,1路RTC定时唤醒信号 | | 工作温度 | -40℃~+85℃ | | 防护等级 | 防尘防水等级IP67,气候环境防护符合ISO16750-4,化学环境防护符合ISO16750-5 | | 机械强度 | 振动、冲击、跌落试验符合ISO16750-3 | | 外壳 | 材料铝,外部尺寸210mm×150mm×40mm | | 休眠电流 | 小于1mA(可支持零功耗) | | 重量 | 约600g | | 应用场合 | 燃料电池系统控制器、氢气管理系统控制器、混合动力控制器、整车控制器、热管理系统控制器 | ## 三.硬件技术规格表<a name="硬件技术规格表"></a> <b>基本参数</b> | 技术规格 | 描述 | | ---- |:------------------------------------------------ | | 供电电压 | 正常工作电压9V~32V | | 唤醒信号 | 3路外部硬线唤醒信号,1路RTC定时唤醒信号 | | 工作温度 | -40℃~+85℃ | | 防护等级 | 防尘防水等级IP67,气候环境防护符合ISO16750-4,化学环境防护符合ISO16750-5 | | 机械强度 | 振动、冲击、跌落试验符合ISO16750-3 | | 外壳 | 铸铝外壳,表面喷塑处理 | | 接插件 | TE 121P防水连接器 | | 重量 | 约600g | | 功能安全 | 最高可达ASIL D | | 信息安全 | 满足GB 44495-2024与GB 44496-2024的相关要求 | <b>微控制器</b> | 技术规格 | 描述 | | ---- | -------------------------------- | | 主处理器 | S32K344,32位,多核M7,主频160MHz,硬件浮点单元 | | 存储器 | SRAM 512KB,Flash 4MB,EEPROM 64Kb | | 功能安全 | ASIL-D | <b>模拟量输入</b> | 技术规格 | 描述 | | ---- | -------------------------------------------------- | | 通道数 | 21路 | | 硬件配置 | 11路电阻量输入(无源传感器) <br/>21路0~5V电压量输入(其中11路与电阻量输入复用管脚) | <b>开关量输入</b> | 技术规格 | 描述 | | ---- | ---------------------------- | | 通道数 | 24路 | | 硬件配置 | 12路高有效开关量输入 <br/>12路低有效开关量输入 | <b>频率量输入</b> | 技术规格 | 描述 | | ---- | ------------------------------------------------------- | | 通道数 | 8路 | | 硬件配置 | 支持信号频率测量与信号脉宽测量<br/>频率范围10Hz-15kHz <br/>高电平电压范围覆盖5V-32V | <b>SENT传感器输入</b> | 技术规格 | 描述 | | ---- | ---------------------- | | 通道数 | 4路 | | 硬件配置 | SENT传感器接口,符合SAE J2716。 | <b>低端功率驱动输出</b> | 技术规格 | 描述 | | ---- | ------------------------------------------------------------------------------------------------------------- | | 通道数 | 15路 | | 硬件配置 | 5路额定4A,峰值8A,带续流二极管,支持PWM工作模式与开关工作模式,支持电流反馈 <br/>8路额定0.4A,峰值0.5A,开关工作模式 <br/>2路路额定1.2A,峰值3.5A,开关工作模式 | <b>高端功率驱动输出</b> | 技术规格 | 描述 | | ---- | ------------------------------------------------------------------------------------------------------------------------------------------- | | 通道数 | 6路 | | 硬件配置 | 2路额定1.8A,峰值3.5A,支持PWM工作模式与开关工作模式<br/>2路额定1.3A,峰值3.5A,支持PWM工作模式与开关工作模式,与H桥功率驱动输出复用管脚<br/>2路额定2.2A,峰值6A,支持PWM工作模式与开关工作模式,与H桥功率驱动输出复用管脚 | <b>H桥驱动输出</b> | 技术规格 | 描述 | | ---- | ---------------------------------------- | | 通道数 | 4路 | | 硬件配置 | 2路额定2.2A,峰值6A<br/>2路额定1.3A,峰值3.5A | <b>PeakHold驱动</b> | 技术规格 | 描述 | | ---- | ------------------------------------------------------------------------------------- | | 通道数 | 6路 | | 硬件配置 | 选配的Peak-Hold双边驱动(每路两个管脚),带续流二极管,支持PWM工作模式与开关工作模式,Peak 1-7A,Hold 1-3A,软件配置Peak-Hold电流值 | <b>传感器电源输出</b> | 技术规格 | 描述 | | ---- | ---------------------------- | | 通道数 | 6路 | | 硬件配置 | 4路5V传感器供电电源<br/>2路12V传感器供电电源 | <b>通信</b> | 技术规格 | 描述 | | ---- | --------------------------------------------------- | | 通道数 | CAN FD 4路 | | 硬件配置 | 兼容CAN,符合CAN2.0B,ISO11898<br/>其中3路带120R终端电阻,1路不带终端电阻 | <b>EMC特性</b> | 技术规格 | 描述 | | ---- | -------------------------------------- | | ESD | 空气静电放电试验与接触静电放电试验符合ISO 10605-2008的相关要求 | | BCI | 电磁辐射抗扰性符合GB/T 17619-1998的相关要求 | | CE | 传导骚扰特性符合GB/T 18655-2010的相关要求 | | RE | 辐射骚扰特性符合GB/T 18655-2010的相关要求 | | CI | 沿电源线的电瞬态传导抗扰度符合GB/T 21437.2-2021的相关要求 | ## 四.管脚列表(按管脚顺序)<a name="管脚列表(按管脚顺序)"></a> | 引脚 | F23信号名称 | F23信号定义 | | --- | ------------------ | ---------------------------------------------------------------- | | 1 | 1:I_GND | 蓄电池负极 | | 2 | 2:I_ACT1 | 激活信号专用输入通道,带控制器激活功能,内部监控电平值 | | 3 | 3:I_KL15 | 点火开关,带控制器激活功能,内部监控电平值 | | 4 | 4:I_BAT | 蓄电池正极 | | 5 | 5:I_ACT2 | 激活信号专用输入通道,带控制器激活功能,内部监控电平值 | | 6 | 6:I_AN01_10K | 模拟量1,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 7 | 7:I_AN02_5K | 模拟量2,5K上拉到5V,支持0-5V输入或者0.1K~100K电阻输入 | | 8 | 8:I_AN03_10K | 模拟量3,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 9 | 9:I_AN04_5K | 模拟量4,5K上拉到5V,支持0-5V输入或者0.1K~100K电阻输入 | | 10 | 10:I_AN05_5V | 模拟量5,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 11 | 11:I_AN06_5V | 模拟量6,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 12 | 12:I_AN07_5V | 模拟量7,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 13 | 13:PeakHold1 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A<br/>(PeakHold只有F23P控制器配备) | | 14 | 14:I_GND | CAN总线屏蔽地 | | 15 | 15:O_GND | 传感器供电负极 | | 16 | 16:PeakHold2 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A<br/>(PeakHold只有F23P控制器配备) | | 17 | 17:PeakHold3 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A<br/>(PeakHold只有F23P控制器配备) | | 18 | 18:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 19 | 19:I_SW01_H | 开关量1,高有效,内部有20K下拉电阻 | | 20 | 20:PeakHold4 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A<br/>(PeakHold只有F23P控制器配备) | | 21 | 21:UBOOST | PeakHold型功率驱动高端电源<br/>(PeakHold只有F23P控制器配备) | | 22 | 22:PeakHold5 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A<br/>(PeakHold只有F23P控制器配备) | | 23 | 23:PeakHold6 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A<br/>(PeakHold只有F23P控制器配备) | | 24 | 24:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 25 | 25:I_Bootkey | Bootloader启动配置,低有效进入程序下载模式 | | 26 | 26:O_GND | 传感器供电负极 | | 27 | 27:I_AN08_10K | 模拟量8,10kΩ上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 28 | 28:I_AN09_10K | 模拟量9,10kΩ上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 29 | 29:I_AN10_5V | 模拟量10,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 30 | 30:O_GND | 传感器供电负极 | | 31 | 31:I_AN11_5V | 模拟量11,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 32 | 32:I_AN12_5V | 模拟量12,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 33 | 33:I_AN13_5V | 模拟量13,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 34 | 34:I_AN14_5V | 模拟量14,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 35 | 35:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 36 | 36:UBOOST | PeakHold型功率驱动高端电源<br/>(PeakHold只有F23P控制器配备) | | 37 | 37:O_LSW_1A2 | 低端功率驱动,1.2A,开关工作模式 | | 38 | 38:I_SW02_H | 开关量2,高有效,内部有20K下拉电阻 | | 39 | 39:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 40 | 40:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 41 | 41:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 42 | 42:UBOOST | PeakHold型功率驱动高端电源<br/>(PeakHold只有F23P控制器配备) | | 43 | 43:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 44 | 44:I_AN15_2K | 模拟量15,2K上拉到5V,支持0-5V输入或者0.1K~50K电阻输入 | | 45 | 45:CAN2_L | CAN2,低,内部集成120R终端电阻 | | 46 | 46:I_AN16_10K | 模拟量16,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 47 | 47:CAN1_L | CAN1,低,内部不带CAN终端电阻 | | 48 | 48:I_AN17_10K | 模拟量17,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 49 | 49:CAN0_L | CAN0,低,内部集成120R终端电阻 | | 50 | 50:CAN3_L | CAN3,低,内部集成120R终端电阻,标定CAN | | 51 | 51:I_AN18_5V | 模拟量18,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 52 | 52:I_AN19_5V | 模拟量19,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 53 | 53:O_GND | 传感器供电负极 | | 54 | 54:I_PWM1/SW19 | PWM信号输入,内部2K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 55 | 55:I_PWM2/SW20 | PWM信号输入,内部2K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 56 | 56:I_SW03_H | 开关量3,高有效,内部有20K下拉电阻 | | 57 | 57:I_SW04_H | 开关量4,高有效,内部有20K下拉电阻 | | 58 | 58:UBOOST | PeakHold型功率驱动高端电源<br/>(PeakHold只有F23P控制器配备) | | 59 | 59:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 60 | 60:O_12V_GND | 12V传感器电源负极 | | 61 | 61:O_12V_500MA | 12V传感器电源正极,12V,500mA | | 62 | 62:O_12V_500MA | 12V传感器电源正极,12V,500mA | | 63 | 63:I_AN20_2K | 模拟量20,2K上拉到5V,支持0-5V输入或者0.1K~50K电阻输入 | | 64 | 64:CAN2_H | CAN2,高,内部集成120R终端电阻 | | 65 | 65:O_GND | 传感器供电负极 | | 66 | 66:CAN1_H | CAN1,高,内部不带CAN终端电阻 | | 67 | 67:O_GND | 传感器供电负极 | | 68 | 68:CAN0_H | CAN0,高,内部集成120R终端电阻 | | 69 | 69:CAN3_H | CAN3,高,内部集成120R终端电阻,标定CAN | | 70 | 70:O_GND | 传感器供电负极 | | 71 | 71:I_AN21_10K | 模拟量21,10K上拉到5V,支持0~5V输入或者0.2K~200K电阻输入 | | 72 | 72:I_PWM3/SW21 | PWM信号输入,内部2K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 73 | 73:I_PWM4/SW22 | PWM信号输入,内部20K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 74 | 74:I_PWM5/SW23 | PWM信号输入,内部20K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 75 | 75:I_PWM6/SW24 | PWM信号输入,内部20K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 76 | 76:O_GND | 传感器供电负极 | | 77 | 77:O_5V_100MA | 传感器电源,5V,100mA | | 78 | 78:O_5V_100MA | 传感器电源,5V,100mA | | 79 | 79:O_5V_100MA | 传感器电源,5V,100mA | | 80 | 80:O_GND | 传感器供电负极 | | 81 | 81:O_5V_100MA | 传感器电源,5V,100mA | | 82 | 82:O_H1+_2A2 | H桥驱动1+,2.2A,兼容高端PWM与高端开关 | | 83 | 83:O_H1- | H桥驱动1-,2.2A,与82#管脚配对使用 | | 84 | 84:I_SW05_L/PWM7 | 开关量5,低有效,兼容PWM信号输入,内部20K上拉到5V | | 85 | 85:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 86 | 86:I_SW06_H | 开关量6,高有效,内部有20K下拉电阻 | | 87 | 87:I_SW07_H | 开关量7,高有效,内部有20K下拉电阻 | | 88 | 88:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 89 | 89:O_HSW_1A8 | 高端功率驱动,1.8A,开关工作模式 | | 90 | 90:O_MR_LS1A2 | 外部主继电器控制开关,低端驱动,1.2A,上电自动拉低,无需软件控制 | | 91 | 91:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 92 | 92:I_SW08_L/SENT1 | 开关量8,低有效,兼容SENT信号,内部2K上拉到5V | | 93 | 93:I_SW09_L/SENT2 | 开关量9,低有效,兼容SENT信号,内部2K上拉到5V | | 94 | 94:I_SW10_H | 开关量10,高有效,内部有20K下拉电阻 | | 95 | 95:I_SW11_H | 开关量11,高有效,内部有20K下拉电阻 | | 96 | 96:I_SW12_H | 开关量12,高有效,内部有20K下拉电阻 | | 97 | 97:O_HPWM_1A8 | 高端功率驱动,1.8A,兼容PWM工作模式与开关工作模式 | | 98 | 98:O_H2+_1A3 | H桥驱动2+,1.3A,兼容高端PWM与高端开关 | | 99 | 99:O_H3+_1A3 | H桥驱动3+,1.3A,兼容高端PWM与高端开关 | | 100 | 100:I_SW13_L/SENT3 | 开关量13,低有效,兼容SENT信号,内部2K上拉到5V | | 101 | 101:I_SW14_L/SENT4 | 开关量14,低有效,兼容SENT信号,内部2K上拉到5V | | 102 | 102:I_SW15_H | 开关量15,高有效,内部有20K下拉电阻 | | 103 | 103:I_SW16_H | 开关量16,高有效,内部有20K下拉电阻 | | 104 | 104:I_SW17_H | 开关量17,高有效,内部有20K下拉电阻 | | 105 | 105:O_H4+_2A2 | H桥驱动4+,2.2A,兼容高端PWM与高端开关 | | 106 | 106:O_H2- | H桥驱动2-,1.3A,与98#管脚配对使用 | | 107 | 107:O_H3- | H桥驱动3-,1.3A,与99#管脚配对使用 | | 108 | 108:I_SW18_L/PWM8 | 开关量18,低有效,兼容PWM信号输入,内部20K上拉到5V | | 109 | 109:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 110 | 110:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 111 | 111:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 112 | 112:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 113 | 113:O_H4- | H桥驱动4-,2.2A,与105#管脚配对使用 | | 114 | 114:I_GND | 蓄电池负极 | | 115 | 115:I_GND | 蓄电池负极 | | 116 | 116:I_UBR | 主继电器后蓄电池正极 | | 117 | 117:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 118 | 118:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 119 | 119:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 120 | 120:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 121 | 121:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | ## 五.管脚列表(按功能模块)<a name="管脚列表(按功能模块)"></a> ### 1.电源类管脚<a name="电源类管脚"></a> <b>电源</b> | 信号名称 | 信号定义 | | -------------- | ---------------------------------- | | 1:I_GND | 蓄电池负极 | | 2:I_ACT1 | 激活信号专用输入通道,带控制器激活功能,内部监控电平值 | | 3:I_KL15 | 点火开关,带控制器激活功能,内部监控电平值 | | 4:I_BAT | 蓄电池正极 | | 5:I_ACT2 | 激活信号专用输入通道,带控制器激活功能,内部监控电平值 | | 14:I_GND | CAN总线屏蔽地 | | 15:O_GND | 传感器供电负极 | | 26:O_GND | 传感器供电负极 | | 30:O_GND | 传感器供电负极 | | 53:O_GND | 传感器供电负极 | | 60:O_12V_GND | 12V传感器电源负极 | | 61:O_12V_500MA | 12V传感器电源正极,12V,500mA | | 62:O_12V_500MA | 12V传感器电源正极,12V,500mA | | 65:O_GND | 传感器供电负极 | | 67:O_GND | 传感器供电负极 | | 70:O_GND | 传感器供电负极 | | 76:O_GND | 传感器供电负极 | | 77:O_5V_100MA | 传感器电源,5V,100mA | | 78:O_5V_100MA | 传感器电源,5V,100mA | | 79:O_5V_100MA | 传感器电源,5V,100mA | | 80:O_GND | 传感器供电负极 | | 81:O_5V_100MA | 传感器电源,5V,100mA | | 85:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 88:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 90:O_MR_LS1A2 | 外部主继电器控制开关,低端驱动,1.2A,上电自动拉低,无需软件控制 | | 91:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 109:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 110:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 111:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 112:O_UBR | 主继电器后蓄电池正极,用于低端功率驱动负载的电源正极 | | 114:I_GND | 蓄电池负极 | | 115:I_GND | 蓄电池负极 | | 116:I_UBR | 主继电器后蓄电池正极 | ### 2.输入类管脚<a name="输入类管脚"></a> <b>BOOTKEY</b> | 信号名称 | 信号定义 | | ------------ | -------------------------- | | 25:I_Bootkey | Bootloader启动配置,低有效进入程序下载模式 | <b>开关量输入</b> | 信号名称 | 信号定义 | | ------------------ | ------------------------------ | | 19:I_SW01_H | 开关量1,高有效,内部有20K下拉电阻 | | 38:I_SW02_H | 开关量2,高有效,内部有20K下拉电阻 | | 56:I_SW03_H | 开关量3,高有效,内部有20K下拉电阻 | | 57:I_SW04_H | 开关量4,高有效,内部有20K下拉电阻 | | 84:I_SW05_L/PWM7 | 开关量5,低有效,兼容PWM信号输入,内部20K上拉到5V | | 86:I_SW06_H | 开关量6,高有效,内部有20K下拉电阻 | | 87:I_SW07_H | 开关量7,高有效,内部有20K下拉电阻 | | 92:I_SW08_L/SENT1 | 开关量8,低有效,兼容SENT信号,内部2K上拉到5V | | 93:I_SW09_L/SENT2 | 开关量9,低有效,兼容SENT信号,内部2K上拉到5V | | 94:I_SW10_H | 开关量10,高有效,内部有20K下拉电阻 | | 95:I_SW11_H | 开关量11,高有效,内部有20K下拉电阻 | | 96:I_SW12_H | 开关量12,高有效,内部有20K下拉电阻 | | 100:I_SW13_L/SENT3 | 开关量13,低有效,兼容SENT信号,内部2K上拉到5V | | 101:I_SW14_L/SENT4 | 开关量14,低有效,兼容SENT信号,内部2K上拉到5V | | 102:I_SW15_H | 开关量15,高有效,内部有20K下拉电阻 | | 103:I_SW16_H | 开关量16,高有效,内部有20K下拉电阻 | | 104:I_SW17_H | 开关量17,高有效,内部有20K下拉电阻 | | 108:I_SW18_L/PWM8 | 开关量18,低有效,兼容PWM信号输入,内部20K上拉到5V | <b>模拟量输入</b> | 信号名称 | 信号定义 | | ------------- | -------------------------------------- | | 6:I_AN01_10K | 模拟量1,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 7:I_AN02_5K | 模拟量2,5K上拉到5V,支持0-5V输入或者0.1K~100K电阻输入 | | 8:I_AN03_10K | 模拟量3,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 9:I_AN04_5K | 模拟量4,5K上拉到5V,支持0-5V输入或者0.1K~100K电阻输入 | | 10:I_AN05_5V | 模拟量5,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 11:I_AN06_5V | 模拟量6,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 12:I_AN07_5V | 模拟量7,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 27:I_AN08_10K | 模拟量8,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 28:I_AN09_10K | 模拟量9,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 29:I_AN10_5V | 模拟量10,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 31:I_AN11_5V | 模拟量11,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 32:I_AN12_5V | 模拟量12,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 33:I_AN13_5V | 模拟量13,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 34:I_AN14_5V | 模拟量14,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 44:I_AN15_2K | 模拟量15,2K上拉到5V,支持0-5V输入或者0.1K~50K电阻输入 | | 46:I_AN16_10K | 模拟量16,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 48:I_AN17_10K | 模拟量17,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | | 51:I_AN18_5V | 模拟量18,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 52:I_AN19_5V | 模拟量19,0~5V,47K下拉到地(F23P控制器为100K下拉到地) | | 63:I_AN20_2K | 模拟量20,2K上拉到5V,支持0-5V输入或者0.1K~50K电阻输入 | | 71:I_AN21_10K | 模拟量21,10K上拉到5V,支持0-5V输入或者0.2K~200K电阻输入 | <b>PWM信号输入</b> | 信号名称 | 信号定义 | | -------------- | ---------------------------------------- | | 54:I_PWM1/SW19 | PWM信号输入,内部2K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 55:I_PWM2/SW20 | PWM信号输入,内部2K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 72:I_PWM3/SW21 | PWM信号输入,内部2K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 73:I_PWM4/SW22 | PWM信号输入,内部20K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 74:I_PWM5/SW23 | PWM信号输入,内部20K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | | 75:I_PWM6/SW24 | PWM信号输入,内部20K上拉到5V,10Hz~15kHz,兼容低有效开关量输入 | ### 3.输出类管脚<a name="输出类管脚"></a> <b>PeakHold驱动 (PeakHold只有F23P控制器配备)</b> | 信号名称 | 信号定义 | | ------------ | -------------------------------------- | | 13:PeakHold1 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A | | 16:PeakHold2 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A | | 17:PeakHold3 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A | | 20:PeakHold4 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A | | 22:PeakHold5 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A | | 23:PeakHold6 | PeakHold型功率驱动,带续流二极管,Peak最大7A,Hold最大3A | | 21:UBOOST | PeakHold型功率驱动高端电源 | | 36:UBOOST | PeakHold型功率驱动高端电源 | | 42:UBOOST | PeakHold型功率驱动高端电源 | | 58:UBOOST | PeakHold型功率驱动高端电源 | <b>低端功率驱动</b> | 信号名称 | 信号定义 | | ------------- | -------------------------------------- | | 18:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 24:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 35:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 37:O_LSW_1A2 | 低端功率驱动,1.2A,开关工作模式 | | 39:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 40:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 41:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 43:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 59:O_LSW_0A4 | 低端功率驱动开关,0.4A,开关工作模式 | | 90:O_MR_LS1A2 | 外部主继电器控制开关,低端驱动,1.2A,上电自动拉低,无需软件控制 | | 117:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 118:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 119:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 120:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | | 121:O_LPWM_4A | 低端功率驱动,4A,带续流二极管与电流反馈,兼容PWM工作模式与开关工作模式 | <b>高端功率驱动</b> | 信号名称 | 信号定义 | | ------------- | ---------------------------- | | 89:O_HSW_1A8 | 高端功率驱动,1.8A,开关工作模式 | | 97:O_HPWM_1A8 | 高端功率驱动,1.8A,兼容PWM工作模式与开关工作模式 | <b>H桥驱动</b> | 信号名称 | 信号定义 | | --------- | -------------------------------------- | | 82:O_H1+_2A2 | H桥驱动1+,2.2A,兼容高端PWM与高端开关 | | 98:O_H2+_1A3 | H桥驱动2+,1.3A,兼容高端PWM与高端开关 | | 99:O_H3+_1A3 | H桥驱动3+,1.3A,兼容高端PWM与高端开关 | | 105:O_H4+_2A2 | H桥驱动4+,2.2A,兼容高端PWM与高端开关 | | 83:O_H1- | H桥驱动1-,2.2A,与82#管脚配对使用 | | 106:O_H2- | H桥驱动2-,1.3A,与98#管脚配对使用 | | 107:O_H3- | H桥驱动3-,1.3A,与99#管脚配对使用 | | 113:O_H4- | H桥驱动4-,2.2A,与105#管脚配对使用 | ### 4.通信类管脚<a name="通信类管脚"></a> <b>通信</b> | 信号名称 | 信号定义 | | --------- | ------------------------- | | 49:CAN0_L | CAN0,低,内部集成120R终端电阻 | | 68:CAN0_H | CAN0,高,内部集成120R终端电阻 | | 47:CAN1_L | CAN1,低,内部不带CAN终端电阻 | | 66:CAN1_H | CAN1,高,内部不带CAN终端电阻 | | 45:CAN2_L | CAN2,低,内部集成120R终端电阻 | | 64:CAN2_H | CAN2,高,内部集成120R终端电阻 | | 50:CAN3_L | CAN3,低,内部集成120R终端电阻,标定CAN | | 69:CAN3_H | CAN3,高,内部集成120R终端电阻,标定CAN | ## 六.接插件示意图<a name="接插件示意图"></a>  | 接插件信息(TE) | 型号 | | ----------- | --------- | | 121P公头 | 2374035-1 | | 81P母头 | 1473244-1 | | 81P母头盖子 | 1473247-1 | | 81P母头定位器 | 368382-1 | | 40P母头 | 1473252-1 | | 40P母头盖子 | 1473255-1 | | 40P母头定位器 | 368388-1 | | 小端子(0.5mm2) | 968221-1 | | 大端子(1.5mm2) | 964273-2 | ## 七.硬件最小系统接线图<a name="硬件最小系统接线图"></a> **1.接线方式1** 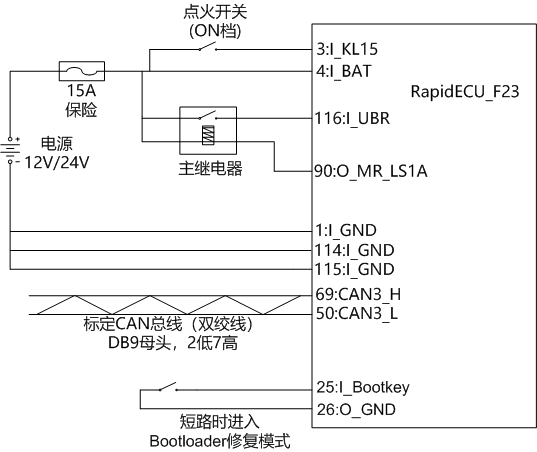 - 接线方式1的启动时间更短,接线方式1控制器内部上电与主继电器闭合同步进行。接线方式1的控制器静态电流小于1mA,接线方式1可使用RTC定时唤醒功能。 **2.接线方式2** 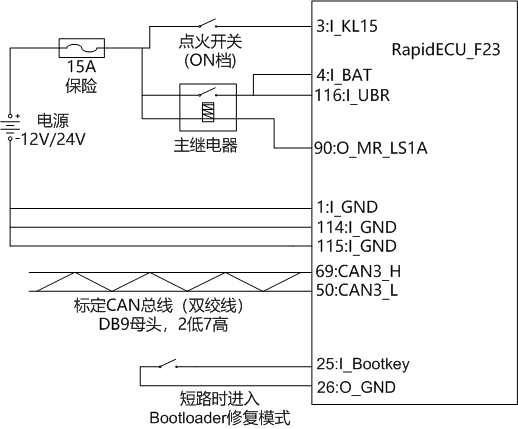 - 接线方式2先闭合主继电器后控制器内部上电。接线方式2的控制器静态电流为零,接线方式2无法使用RTC定时唤醒功能。 ## 八.外形尺寸图<a name="外形尺寸图"></a> 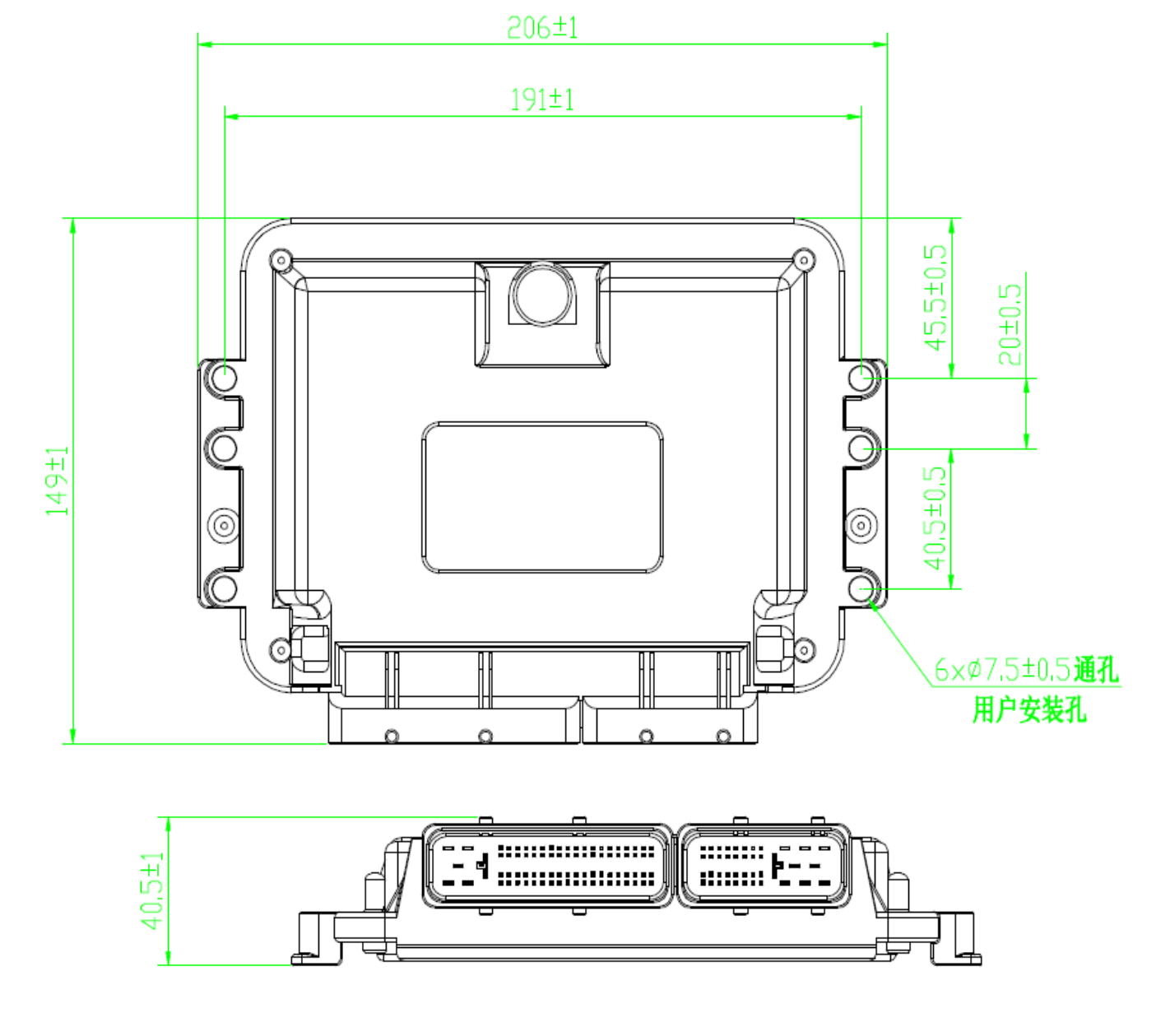 ## 九.电路原理示意图<a name="电路原理示意图"></a> ### 1.控制器激活信号<a name="控制器激活信号"></a> 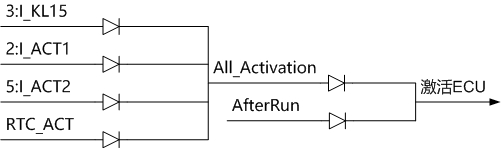 说明: - 3:I_KL15,2:I_ACT1,5:I_ACT2,RTC_ACT四个硬件激活信号构成逻辑或的关系产生All_Activation信号,以上5个信号均可以实时读取。All_Activation信号,AfterRun软件开关构成逻辑或的关系激活控制器,AfterRun可以实时控制。RTC_ACT信号由RTC芯片发出。 关键参数: - 3:I_KL15,2:I_ACT1,5:I_ACT2的有效电压范围是[9V,32V]。 ### 2.高有效开关量输入<a name="高有效开关量输入"></a> 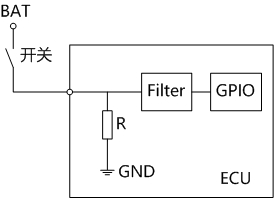 关键参数: - 高电平电压≥4V,低电平电压≤1V。 ### 3.低有效开关量输入<a name="低有效开关量输入"></a> 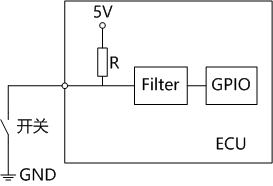 关键参数: - 高电平电压≥4V,低电平电压≤1V。 ### 4.模拟量输入_下拉型<a name="模拟量输入_下拉型"></a> 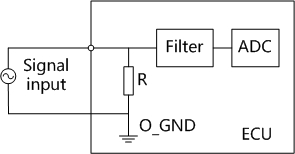 关键参数: - 电压输入范围详见管脚列表,RC滤波截至频率720Hz。 ### 5.模拟量输入_上拉型<a name="模拟量输入_上拉型"></a> 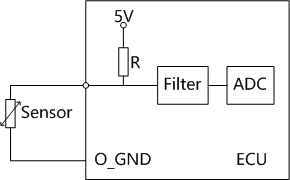 关键参数: - 电阻或者电压输入范围详见管脚列表,RC滤波截至频率720Hz。 ### 6.PWM信号输入<a name="PWM信号输入"></a> 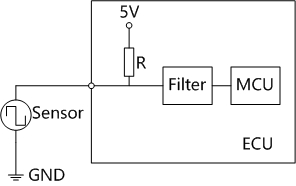 关键参数: - PWM信号频率范围[10Hz,15kHz]; - 频率信号高电平电压范围[5V,32V]; - 兼容集电极开路式传感器信号。 ### 7.PeakHold功率驱动<a name="PeakHold功率驱动"></a> 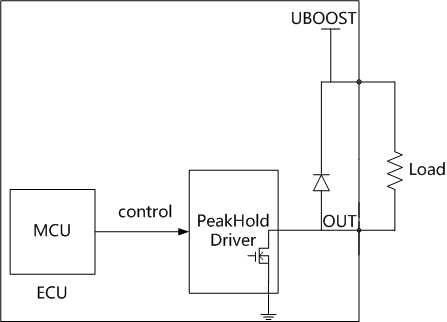 关键参数: - Peak 1-7A,Hold 1-3A,软件配置Peak-Hold电流值; - 兼容开关工作模式与PWM工作模式。 ### 8.低端功率驱动<a name="低端功率驱动"></a> 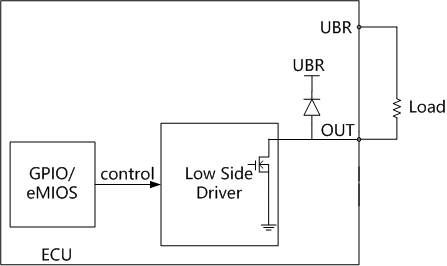 关键参数(通道117、118、119、120、121): - 最大持续电流4A,最大瞬态电流8A; - PWM工作模式的正常工作频率范围为10Hz~10000Hz; - 可以用于驱动PWM电磁阀; - 执行器正极必须连接主继电器后蓄电池正极,用于低端功率驱动负载的电源正极UBR,比如88、109、110管脚。 <br/><br/> 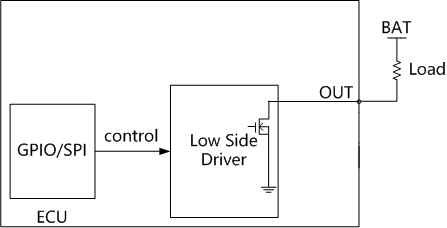 关键参数(通道18、24、35、39、40、41、43、59): - 最大持续电流0.4A,最大瞬态电流0.5A; 关键参数(通道37、90): - 最大持续电流1.2A,最大瞬态电流3.5A。 ### 9.高端功率驱动<a name="高端功率驱动"></a> 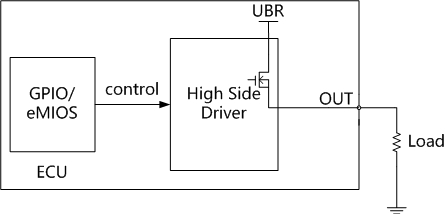 关键参数(通道89、97): - 最大持续电流1.8A,最大瞬态电流3.5A; - PWM工作模式的正常工作频率范围为10Hz~500Hz; - 不可用于驱动PWM电磁阀。 ### 10.H桥驱动<a name="H桥驱动"></a> 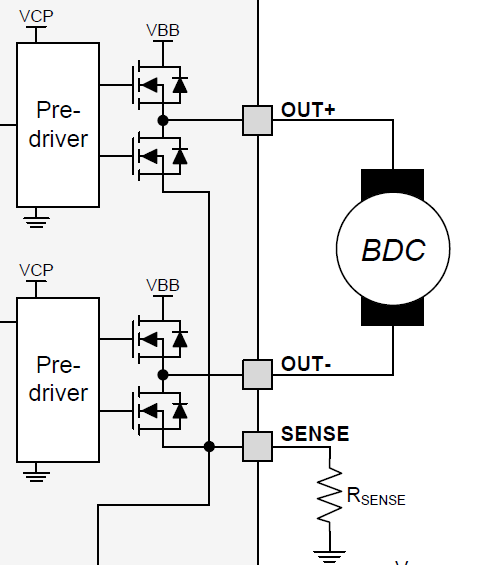 关键参数: - H1(通道82、83):最大持续电流2.2A,最大瞬态电流6A; - H2(通道98、106):最大持续电流1.3A,最大瞬态电流3.5A; - H3(通道99、107):最大持续电流1.3A,最大瞬态电流3.5A; - H4(通道105、113):最大持续电流2.2A,最大瞬态电流6A; - PWM工作模式的正常工作频率范围为10Hz~20000Hz; - 可以用于驱动直流电机、PWM电磁阀等执行器。 ## 十.F23控制器选型表<a name="F23控制器选型表"></a> | 型号 | 描述 | | ------------- | ---------------------------------------------- | | RapidECU-F23 | F23系列燃料电池系统控制器标准型号 | | RapidECU-F23H | F23系列燃料电池系统控制器选配8路恒流驱动,8路PeakHold驱动与内部大气压力传感器 | | RapidECU-F23M | F23系列燃料电池系统控制器选配2路RS485支持Modbus通信协议 | ## 十一.使用注意事项<a name="使用注意事项"></a> 1. 使用控制器时接插件需要插紧,当接插件插紧时,左右两侧接插件应处于对齐状态。如果两侧接插件不对齐,则说明至少有一侧接插件未插紧。 2. 禁止带电热插拔控制器、传感器与执行器,热插拔可能会带来较大的浪涌电压,损坏控制器内部电子元器件。如果需要插拔控制器、传感器与执行器,务必先断电(包括高压电与低压电),再插拔控制器、传感器与执行器。 3. 控制器116#管脚的供电注意事项:116#管脚必须通过主继电器供电,具体请见《硬件最小系统接线图》,否则有可能因为电源反接而导致控制器硬件电源电路烧毁。 4. 控制器安装位置注意事项:控制器安装时接插件开口位置可以朝下或者水平,不可朝上,否则有可能因为接插件进水无法流出而导致接插件插针腐蚀与渗水进入控制器内部。 控制器安装不可处于泥水直接溅到的位置,控制器安装不可处于振动很大的箱板或者大梁上,如果安装在振动很大处,则需要加装减震垫等。 5. 对于带续流二极管低端功率驱动的负载,负载电源端需要接UBR电源,不可接常电BAT,否则有可能因为电流回路导致负载意外开启并且还会造成控制器与负载的静态电流偏大。 6. 由于功率开关响应时间造成的延时问题,H桥驱动的正常工作频率范围为10Hz-20000Hz,低端功率驱动PWM工作模式的正常工作频率范围为10Hz-10000Hz(37#管脚频率上限1000Hz),89#与97#高端功率驱动PWM工作模式的正常工作频率范围为10Hz-500Hz。超出正常工作频率范围有可能导致PWM波形严重畸变,轻则导致负载无法正常工作,重则导致功率开关过压过热损坏。 7. CAN总线必须使用双绞线,双绞线的绞距推荐小于30mm。不使用双绞线轻则导致错误帧,CAN通信质量下降,重则导致CAN总线电平异常,CAN收发器过压过热损坏。CAN总线两端必须各有一个120欧姆左右的终端电阻,终端电阻可以集成在控制器内部,也可以位于总线线束两端。对于总线上的支线CAN节点,支线的长度推荐小于0.3m。支线长度过长轻则导致错误帧,CAN通信质量下降,重则导致CAN总线电平异常,CAN收发器过压过热损坏。 如果需要使用CAN屏蔽线的话,可将屏蔽线与14#管脚相连,如果不使用CAN屏蔽线的话,将14#管脚保持悬空即可。 禁止热插拔CAN总线节点控制器,热插拔可能会带来较大的浪涌电压,损坏CAN收发器。如果需要插拔CAN总线节点控制器,务必先断电(包括高压电与低压电),再插拔控制器。 8. 所有的传感器负极不可与24V负极或者车身直连,传感器负极应该与与控制器的传感器供电负极端口直连。控制器的5V传感器电源不可与24V电源正负级短路。 控制器的传感器供电负极不可与24V电源正负级短路。传感器负极、控制器的传感器供电负极如果与与24V负极或者车身直连会导致外部浪涌电压进入控制器而损坏硬件。 9. 有些传感器存在传感器金属壳体或者屏蔽线与传感器负极直连的情况,不可使用此类传感器,否则有可能会导致外部浪涌电压进入控制器而损坏硬件。 10. 控制器外部供电电源电压范围为9V~32V,过压试验最高32V,不可接入32V以上的电压,否则有可能会导致电源电路硬件损坏。 11. 控制器12V传感器电源由外部供电电源降压得到,只有在外部供电电源电压大于15V时12V传感器电源才能正常工作,否则12V传感器电源电压可能会低于12V。 12V传感器电源的正常工作电压范围是12V~13.8V,12V传感器电源分为61#与62#两个管脚,两个管脚内部直连,每个管脚都可以做到500mA,两个管脚加一起最大也是500mA。 12V传感器电源负极为60#管脚,60#管脚不可与其它的传感器供电负极直连。 12. 控制器5V传感器电源的正常工作电压范围是4.9V~5.1V,分为77#、78#、79#与81#四个管脚,四个管脚内部直连,每个管脚都可以做到100mA,四个管脚加一起最大也是100mA。 13. 控制器模拟量输入通道存在一定误差,5V模拟量输入通道采集误差±30mV。 14. 控制器PWM信号输入通道存在一定误差,对于≤200Hz的PWM信号采集误差±1Hz,对于>200Hz的PWM信号采集误差±0.5%。 15. 《硬件最小系统接线图》中的两种接线方式都是允许的,接线方式1的启动时间更短,接线方式1控制器内部上电与主继电器闭合同步进行,接线方式2先闭合主继电器后上电;接线方式1的控制器静态电流小于1mA,接线方式2的控制器静态电流为零,接线方式1可使用RTC唤醒功能,接线方式2无法使用RTC唤醒功能,实际使用时可根据项目需要自行选择。 16. 对于低端功率驱动的电流反馈,外接不同负载时电流特性差别较大,通常需要使用软件标定(查表)的方式来减小电流反馈误差。 17. PeakHold驱动电路只有F23P控制器配备,F23控制器没有PeakHold驱动,使用F23控制器时,PeakHold相关管脚全部保持悬空即可。