CAN/CANFD
CCP/UDS
Bootloader/OTA
ECU/VCU/FCU
Simulink/ECUCoder
Ethernet
Hardware
Download
上一篇
下一篇
S5控制器硬件参考手册
一.S5控制器简介
二.S5控制器硬件框图
三.硬件技术规格表
四.管脚列表(按管脚顺序)
五.管脚列表(按功能模块)
-1.电源类管脚
-2.输入类管脚
-3.输出类管脚
-4.通信类管脚
六.接插件示意图
七.硬件最小系统接线图
八.外形尺寸图
九.电路原理示意图
-1.模拟量输入_下拉型
-2.模拟量输入_上拉型
-3.开关量输入
-4.频率量输入
-5.CAN总线
-6.LIN总线
-7.FlexRay
-8.Ethernet
-9.PSI5
-10.SENT
-11.低边功率驱动
-12.高边功率驱动
-13.H桥驱动
十.使用注意事项
回到顶部
S5控制器硬件参考手册
一.S5控制器简介
二.S5控制器硬件框图
三.硬件技术规格表
四.管脚列表(按管脚顺序)
五.管脚列表(按功能模块)
-1.电源类管脚
-2.输入类管脚
-3.输出类管脚
-4.通信类管脚
六.接插件示意图
七.硬件最小系统接线图
八.外形尺寸图
九.电路原理示意图
-1.模拟量输入_下拉型
-2.模拟量输入_上拉型
-3.开关量输入
-4.频率量输入
-5.CAN总线
-6.LIN总线
-7.FlexRay
-8.Ethernet
-9.PSI5
-10.SENT
-11.低边功率驱动
-12.高边功率驱动
-13.H桥驱动
十.使用注意事项
回到顶部
# RapidECU-S5控制器硬件参考手册 ## 一.S5控制器简介<a name="S5控制器简介"></a> 随着智能线控底盘技术的迅猛发展,采用华海科技推出的支持全自动代码生成的底盘域控制器来协调车辆的横、纵、垂运动控制实现车辆的行驶轨迹跟踪和姿态控制,具有较高的性价比,可以显著节省开发成本、缩短开发周期。RapidECU-S5集成支持各类型的减震器阻尼控制、空气弹簧高度控制资源,且IO资源、通信资源和算力资源可以支持集成整车动力、转向、制动、悬架等车辆横、纵、垂向的各类控制功能。  **S5控制器产品特色** - 处理速度快,基于TC397的32位六核浮点运算处理器,每核主频高达300MHz,Flash存储空间高达16MB。 - 功能安全等级高ASIL-D,使用全新一代面向ISO26262 ASIL-D的设计。 - 信息安全等级高,采用硬件安全模块HSM保证系统安全,提高实时性,降低系统开销; - 支持FOTA,可以支持刷写A/B分区备份,支持回滚机制。 - 易用性好,采用基于模型的图形化建模软件开发与全自动代码生成技术,无需手工编程。 - 刷写速度快,基于CAN FD的高速刷写,刷写速度可达2MB/min。 - 通信接口丰富,性能强大,支持8路CAN FD,2路LIN,1路FlexRay,1路100BASE-T1以太网,1路SENT及4路PSI5外设,其中PSI5通信最多可支持24个传感器。 - 丰富的驱动资源,可以同时支持4路恒流驱动和4路H桥驱动,满足不同类型的CDC减震器和空气悬架电磁阀驱动,实现持续减震控制CDC和电控空气悬架ECAS等功能。 - 供电范围广,供电范围9V~32V,兼容12V及24V供电系统。 - 板内资源丰富,集成高精度、高功能安全等级的六轴惯性测量单元IMU,可输出三轴向的加速度及角度信息,满足四轮独立扭矩矢量控制、高级驾驶辅助ADAS等应用需求,内置板上温度传感器,支持-40~125℃ 板上温度测量。 - 硬件防护等级可达IP68,可以便捷地在整车各区域布置,在水浸、沙尘等恶劣工作环境中仍能够可靠而高效的运行。 ## 二.S5控制器硬件框图<a name="S5控制器硬件框图"></a> 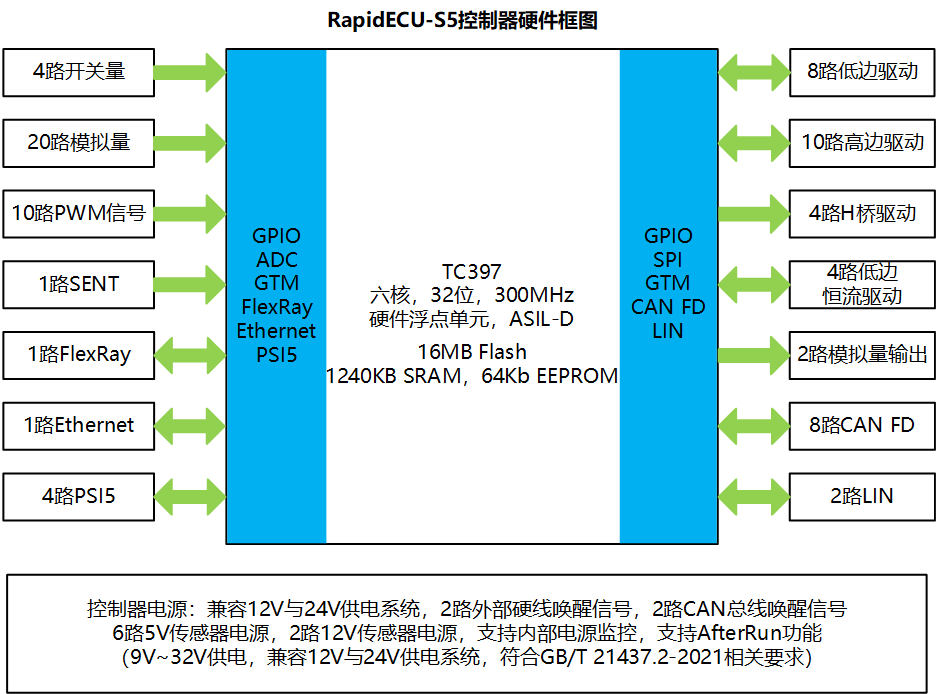 | 技术规格 | 描述 | | ---- | ---------------------------------------------------------------------------- | | 供电电压 | 正常工作电压9V~32V | | 唤醒信号 | 2路外部硬线唤醒,2路CAN(FD)唤醒 | | 工作温度 | -40℃~+125℃ | | 防护等级 | 防尘防水等级IP68 | | 机械强度 | 振动、冲击、跌落试验符合ISO16750-3 | | 外壳 | 铸铝外壳,外部尺寸225mm×200mm×48mm | | 重量 | 约850g | | 应用场合 | 支持各类型的减震器阻尼控制、空气弹簧高度控制资源,且IO资源、通信资源和算力资源可以支持集成整车动力、转向、制动、悬架等车辆横、纵、垂向的各类控制功能。 | ## 三.硬件技术规格表<a name="硬件技术规格表"></a> <b>基本参数</b> | 技术规格 | 描述 | | ---- |:---------------------- | | 供电电压 | 正常工作电压9V~32V | | 唤醒信号 | 2路外部硬线唤醒,2路CAN(FD)唤醒 | | 工作温度 | -40℃~+125℃ | | 防护等级 | 防护等级:IP68。 | | 机械强度 | 振动、冲击、跌落试验符合ISO16750-3 | | 接插件 | 121针TE接插件 | | 外壳 | 铸铝外壳,表面抛丸处理 | | 重量 | 850g | | 功能安全 | 最高可达ASIL D | <b>微控制器</b> | 技术规格 | 描述 | | ---- | ---------------------------------- | | 主处理器 | TC397,32 位, 6核,最高主频 300MHz, 硬件浮点单元 | | 存储器 | SRAM 240KB,Flash 16MB,EEPROM 64KB | | 功能安全 | ASIL-D | <b>模拟量输入</b> | 技术规格 | 描述 | | ---- | ---------------------------------------------------------- | | 通道数 | 20路 | | 硬件配置 | 14路电压量输入(0-5V有源传感器) ,支持故障诊断;<br>6路电阻量输入(无源传感器),支持故障诊断。<br> | <b>开关量输入</b> | 技术规格 | 描述 | | ---- | ----------- | | 通道数 | 4路 | | 硬件配置 | 5V高有效开关量输入。 | <b>频率量输入</b> | 技术规格 | 描述 | | ---- | --------------- | | 通道数 | 10路 | | 硬件配置 | 频率范围10Hz~20kHz。 | <b>SENT传感器输入</b> | 技术规格 | 描述 | | ---- | ---------------- | | 通道数 | 1路 | | 硬件配置 | 支持 SAE J2726 标准。 | <b>低边功率驱动输出</b> | 技术规格 | 描述 | | ---- | ---------------------------------------------------------------------------------- | | 通道数 | 8路 | | 硬件配置 | 额定电流1.1A,峰值电流2A,带续流二极管,支持PWM工作模式和开关工作模式,支持开路、对地短路、对电源短路上报功能,具有短路、过流、过温自保护功能 。<br/> | <b>高边驱动输出</b> | 技术规格 | 描述 | | ---- | ---------------------------------------------------------------------------------- | | 通道数 | 10路 | | 硬件配置 | 额定1.1A,峰值2A,支持PWM工作模式和开关工作模式。 <br/>支持欠压、开路、对地短路、对电源短路、过流、过温检测上报功能,具有短路、过流、过温自保护功能。 | <b>低边恒流驱动输出</b> | 技术规格 | 描述 | | ---- | ------------------------------------------------------------------ | | 通道数 | 4路 | | 硬件配置 | 电流范围0~2.7A,支持PWM工作模式和开关工作模式,支持开路、热关断,对地短路诊断功能,电压检测功能,具有过流、过温自保护功能。 | <b>H桥驱动输出</b> | 技术规格 | 描述 | | ---- | ----------------------------------------------------------- | | 通道数 | 4路 | | 硬件配置 | 支持 PWM工作模式,额定1.9A,峰值3A支持开路、欠压、过流、过温检测上报功能 ,具有短路、过流、过温自保护功能。 | <b>传感器电源输出</b> | 技术规格 | 描述 | | ---- | --------------------------------------------- | | 通道数 | 8路 | | 硬件配置 | 6路5V传感器供电电源,每路100mA;<br>2路12V传感器供电电源,每路300mA。 | <b>模拟量输出</b> | 技术规格 | 描述 | | ---- | ---------- | | 通道数 | 2路 | | 硬件配置 | 1~10V范围可调。 | <b>CAN通信</b> | 技术规格 | 描述 | | ---- | ---------------------------------------------------------------------- | | 通道数 | 8路 | | 硬件配置 | CAN FD,兼容CAN,符合CAN2.0B,ISO11898;<br>8路均带有120R终端电阻;<br>其中2路支持指定ID的网络唤醒。 | <b>LIN通信</b> | 技术规格 | 描述 | | ---- | ----------------------- | | 通道数 | 2路 | | 硬件配置 | 主机模式,LIN2.X,符合ISO17987。 | <b>FlexRay通信</b> | 技术规格 | 描述 | | ---- | --------------------- | | 通道数 | 1路 | | 硬件配置 | 兼容ISO 17458-4:2013规范。 | <b>Ethernet通信</b> | 技术规格 | 描述 | | ---- | ------------------------ | | 通道数 | 1路 | | 硬件配置 | 100BASE-T1,Ethernet通信接口。 | <b>PSI5通信</b> | 技术规格 | 描述 | | ---- | -------------------------------- | | 通道数 | 4路 | | 硬件配置 | 兼容rev1.3及rev2.X,最多可扩展24个PSI5传感器。 | ## 四.管脚列表(按管脚顺序)<a name="管脚列表(按管脚顺序)"></a> | 管脚列表 | 信号定义 | 信号说明 | | ---- | --------------- | --------------------------------------- | | X1 | I_GND | 蓄电池负极(功率地) | | X2 | I_GND | 蓄电池负极(功率地) | | X3 | I_GND | 传感器供电负极(模拟地) | | X4 | I_GND | 传感器供电负极(模拟地) | | X5 | I_BAT | 蓄电池正极,内部监控电压值 | | X6 | I_KL15 | 点火开关,带控制器激活功能,内部监控电压值 | | X7 | I_AN01_5V | 电压型模拟量,0~5V | | X8 | I_AN02_5V | 电压型模拟量,0~5V | | X9 | I_AN03_5V | 电压型模拟量,0~5V | | X10 | I_AN04_5V | 电压型模拟量,0~5V | | X11 | I_AN05_5V | 电压型模拟量,0~5V | | X12 | I_AN06_5V | 电压型模拟量,0~5V | | X13 | I_AN07_5V | 电压型模拟量,0~5V | | X14 | I_AN1_R | 电阻型模拟量,内部上拉2K电阻 | | X15 | I_AN2_R | 电阻型模拟量,内部上拉2K电阻 | | X16 | I_AN3_R | 电阻型模拟量,内部上拉2K电阻 | | X17 | LIN0 | LIN0总线 | | X18 | TRX_P | Ethernet终端发送/接收信号,正 | | X19 | I_SW01_H | 开关量,默认高有效,内部有20K下拉电阻 | | X20 | O_LPWM09_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X21 | O_LPWM10_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X22 | O_LPWM11_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X23 | I_PWM01 | PWM信号输入,内部5.1K上拉到5V | | X24 | I_PWM02 | PWM信号输入,内部5.1K上拉到5V | | X25 | I_Bootkey | Bootloader启动配置,低有效进入程序下载模式 | | X26 | I_AN08_5V | 电压型模拟量,0~5V | | X27 | I_AN09_5V | 电压型模拟量,0~5V | | X28 | I_AN10_5V | 电压型模拟量,0~5V | | X29 | I_AN11_5V | 电压型模拟量,0~5V | | X30 | I_AN12_5V | 电压型模拟量,0~5V | | X31 | I_AN13_5V | 电压型模拟量,0~5V | | X32 | I_AN14_5V | 电压型模拟量,0~5V | | X33 | I_AN4_R | 电阻型模拟量,内部上拉2K电阻 | | X34 | I_AN5_R | 电阻型模拟量,内部上拉2K电阻 | | X35 | I_AN6_R | 电阻型模拟量,内部上拉2K电阻 | | X36 | LIN1 | LIN1总线 | | X37 | TRX_M | Ethernet终端发送/接收信号,负 | | X38 | I_SW02_H | 开关量,默认高有效,内部有20K下拉电阻 | | X39 | O_LPWM06_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X40 | O_LPWM07_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X41 | O_LPWM08_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断z | | X42 | I_PWM03 | PWM信号输入,内部5.1K上拉到5V | | X43 | I_PWM04 | PWM信号输入,内部5.1K上拉到5V | | X44 | CAN6_H | CAN6,高,内部集成120R终端电阻 | | X45 | CAN5_H | CAN5,高,内部集成120R终端电阻 | | X46 | CAN4_H | CAN4,高,内部集成120R终端电阻 | | X47 | CAN2_H | CAN2,高,内部集成120R终端电阻 | | X48 | CAN1_H | CAN1,高,内部集成120R终端电阻,带CAN唤醒 | | X49 | CAN0_H | CAN0,高,内部集成120R终端电阻,带CAN唤醒 | | X50 | CAN3_H | CAN3,高,内部集成120R终端电阻,标定CAN | | X51 | BP | FlexRay总线正 | | X52 | BM | FlexRay总线负 | | X53 | I_GND | 传感器供电负极(模拟地) | | X54 | I_IN1 | 外部硬线唤醒 | | X55 | I_IN2 | 外部硬线唤醒 | | X56 | I_SW03_H | 开关量,默认高有效,内部有20K下拉电阻 | | X57 | I_SW04_H | 开关量,默认高有效,内部有20K下拉电阻 | | X58 | O_LPWM04_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X59 | O_LPWM05_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X60 | I_PWM05 | PWM信号输入,内部5.1K上拉到5V | | X61 | I_PWM06 | PWM信号输入,内部5.1K上拉到5V | | X62 | I_PWM07 | PWM信号输入,内部5.1K上拉到5V | | X63 | CAN6_L | CAN6,低,内部集成120R终端电阻 | | X64 | CAN5_L | CAN5,低,内部集成120R终端电阻 | | X65 | CAN4_L | CAN4,低,内部集成120R终端电阻 | | X66 | CAN2_L | CAN2,低,内部集成120R终端电阻 | | X67 | CAN1_L | CAN1,低,内部集成120R终端电阻,带CAN唤醒 | | X68 | CAN0_L | CAN0,低,内部集成120R终端电阻,带CAN唤醒 | | X69 | CAN3_L | CAN3,低,内部集成120R终端电阻,标定CAN | | X70 | 0_5V_100mA | 传感器电源,5V,100mA | | X71 | 0_5V_100mA | 传感器电源,5V,100mA | | X72 | 0_5V_100mA | 传感器电源,5V,100mA | | X73 | 0_5V_100mA | 传感器电源,5V,100mA | | X74 | 0_5V_100mA | 传感器电源,5V,100mA | | X75 | 0_5V_100mA | 传感器电源,5V,100mA | | X76 | O_CURRENT1_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X77 | O_CURRENT2_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X78 | O_CURRENT3_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X79 | I_PWM08 | PWM信号输入,内部5.1K上拉到5V | | X80 | I_PWM09 | PWM信号输入,内部5.1K上拉到5V | | X81 | I_PWM10 | PWM信号输入,内部5.1K上拉到5V | | X82 | CAN7_L | CAN7,低,内部集成120R终端电阻 | | X83 | O_AO1 | 模拟量输出1-10V | | X84 | O_AO2 | 模拟量输出1-10V | | X85 | 0_12V_300mA | 传感器电源,12V,300mA | | X86 | O_HPWM01_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X87 | O_HPWM02_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X88 | O_BRIDGE1+_1.9A | H桥驱动信号输出,第1路正,额定1.9A,峰值3A,内部高精度电流回采 | | X89 | O_BRIDGE1-_1.9A | H桥驱动信号输出,第1路负,额定1.9A,峰值3A,内部高精度电流回采 | | X90 | CAN7_H | CAN7,高,内部集成120R终端电阻 | | X91 | O_CURRENT4_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X93 | 0_12V_300mA | 传感器电源,12V,300mA | | X94 | O_HPWM03_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X95 | O_HPWM04_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X96 | O_BRIDGE2+_1.9A | H桥驱动信号输出,第2路正,额定1.9A,峰值3A,内部高精度电流回采 | | X97 | O_BRIDGE2-_1.9A | H桥驱动信号输出,第2路负,额定1.9A,峰值3A,内部高精度电流回采 | | X98 | GND1 | PSI5接口的接地回路1 | | X99 | GND2 | PSI5接口的接地回路2 | | X100 | GND3 | PSI5接口的接地回路3 | | X101 | GND4 | PSI5接口的接地回路4 | | X102 | O_HPWM05_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X103 | O_HPWM06_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X104 | O_BRIDGE3+_1.9A | H桥驱动信号输出,第3路正,额定1.9A,峰值3A,内部高精度电流回采 | | X105 | O_BRIDGE3-_1.9A | H桥驱动信号输出,第3路负,额定1.9A,峰值3A,内部高精度电流回采 | | X106 | PSI1 | PSI5外设1 | | X107 | PSI2 | PSI5外设2 | | X108 | PSI3 | PSI5外设3 | | X109 | PSI4 | PSI5外设4 | | X110 | SENT | SENT信号输入端口 | | X111 | O_HPWM07_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X112 | O_HPWM08_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X113 | O_HPWM09_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X114 | O_BRIDGE4+_1.9A | H桥驱动信号输出,第4路正,额定1.9A,峰值3A,内部高精度电流回采 | | X115 | I_GND | 功率芯片供电负极(功率地) | | X116 | I_GND | 功率芯片供电负极(功率地) | | X117 | O_BRIDGE4-_1.9A | H桥驱动信号输出,第4路负,额定1.9A,峰值3A,内部高精度电流回采 | | X118 | I_UBR | 主继电器后蓄电池正极,内部监控电压值 | | X119 | O_HPWM10_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X120 | I_UBR | 主继电器后蓄电池正极,内部监控电压值 | | X121 | I_UBR | 主继电器后蓄电池正极,内部监控电压值 | ## 五.管脚列表(按功能模块)<a name="管脚列表(按功能模块)"></a> ### 1.电源类管脚<a name="电源类管脚"></a> <b>电源</b> | 管脚列表 | 信号定义 | 信号说明 | | ---- | ----------- | --------------------- | | X1 | I_GND | 蓄电池负极(功率地) | | X2 | I_GND | 蓄电池负极(功率地) | | X3 | I_GND | 传感器供电负极(模拟地) | | X4 | I_GND | 传感器供电负极(模拟地) | | X5 | I_BAT | 蓄电池正极,内部监控电压值 | | X6 | I_KL15 | 点火开关,带控制器激活功能,内部监控电压值 | | X53 | I_GND | 传感器供电负极(模拟地) | | X54 | I_IN1 | 外部硬线唤醒 | | X55 | I_IN2 | 外部硬线唤醒 | | X70 | 0_5V_100mA | 传感器电源,5V,100mA | | X71 | 0_5V_100mA | 传感器电源,5V,100mA | | X72 | 0_5V_100mA | 传感器电源,5V,100mA | | X73 | 0_5V_100mA | 传感器电源,5V,100mA | | X74 | 0_5V_100mA | 传感器电源,5V,100mA | | X75 | 0_5V_100mA | 传感器电源,5V,100mA | | X85 | 0_12V_300mA | 传感器电源,12V,300mA | | X93 | 0_12V_300mA | 传感器电源,12V,300mA | | X115 | I_GND | 功率芯片供电负极(功率地) | | X116 | I_GND | 功率芯片供电负极(功率地) | | X118 | I_UBR | 主继电器后蓄电池正极,内部监控电压值 | | X120 | I_UBR | 主继电器后蓄电池正极,内部监控电压值 | | X121 | I_UBR | 主继电器后蓄电池正极,内部监控电压值 | ### 2.输入类管脚<a name="输入类管脚"></a> <b>BOOTKEY</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | --------- | -------------------------- | | X25 | I_BootKey | Bootloader启动配置,低有效进入程序下载模式 | <b>模拟量输入</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | --------- | --------------- | | X7 | I_AN01_5V | 电压型模拟量,0~5V | | X8 | I_AN02_5V | 电压型模拟量,0~5V | | X9 | I_AN03_5V | 电压型模拟量,0~5V | | X10 | I_AN04_5V | 电压型模拟量,0~5V | | X11 | I_AN05_5V | 电压型模拟量,0~5V | | X12 | I_AN06_5V | 电压型模拟量,0~5V | | X13 | I_AN07_5V | 电压型模拟量,0~5V | | X26 | I_AN08_5V | 电压型模拟量,0~5V | | X27 | I_AN09_5V | 电压型模拟量,0~5V | | X28 | I_AN10_5V | 电压型模拟量,0~5V | | X30 | I_AN12_5V | 电压型模拟量,0~5V | | X31 | I_AN13_5V | 电压型模拟量,0~5V | | X32 | I_AN14_5V | 电压型模拟量,0~5V | | X29 | I_AN11_5V | 电压型模拟量,0~5V | | X14 | I_AN1_R | 电阻型模拟量,内部上拉2K电阻 | | X15 | I_AN2_R | 电阻型模拟量,内部上拉2K电阻 | | X16 | I_AN3_R | 电阻型模拟量,内部上拉2K电阻 | | X33 | I_AN4_R | 电阻型模拟量,内部上拉2K电阻 | | X34 | I_AN5_R | 电阻型模拟量,内部上拉2K电阻 | | X35 | I_AN6_R | 电阻型模拟量,内部上拉2K电阻 | <b>开关量输入</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | -------- | -------------------- | | X19 | I_SW01_H | 开关量,默认高有效,内部有20K下拉电阻 | | X38 | I_SW02_H | 开关量,默认高有效,内部有20K下拉电阻 | | X56 | I_SW03_H | 开关量,默认高有效,内部有20K下拉电阻 | | X57 | I_SW04_H | 开关量,默认高有效,内部有20K下拉电阻 | <b>PWM信号输入</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ------- | ------------------- | | X23 | I_PWM01 | PWM信号输入,内部5.1K上拉到5V | | X24 | I_PWM02 | PWM信号输入,内部5.1K上拉到5V | | X42 | I_PWM03 | PWM信号输入,内部5.1K上拉到5V | | X43 | I_PWM04 | PWM信号输入,内部5.1K上拉到5V | | X60 | I_PWM05 | PWM信号输入,内部5.1K上拉到5V | | X61 | I_PWM06 | PWM信号输入,内部5.1K上拉到5V | | X62 | I_PWM07 | PWM信号输入,内部5.1K上拉到5V | | X79 | I_PWM08 | PWM信号输入,内部5.1K上拉到5V | | X80 | I_PWM09 | PWM信号输入,内部5.1K上拉到5V | | X81 | I_PWM10 | PWM信号输入,内部5.1K上拉到5V | ### 3.输出类管脚<a name="输出类管脚"></a> <b>低端功率驱动</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ------------- | -------------------------------------- | | X58 | O_LPWM04_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X59 | O_LPWM05_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X39 | O_LPWM06_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X40 | O_LPWM07_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X41 | O_LPWM08_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X20 | O_LPWM09_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X21 | O_LPWM10_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X22 | O_LPWM11_1.1A | 低端功率驱动,额定电流1.1A,兼容PWM工作模式与开关工作模式,带内部诊断 | <b>高边功率驱动</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ------------- | --------------------------------- | | X86 | O_HPWM01_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X87 | O_HPWM02_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X94 | O_HPWM03_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X95 | O_HPWM04_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X102 | O_HPWM05_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X103 | O_HPWM06_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X111 | O_HPWM07_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X112 | O_HPWM08_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X113 | O_HPWM09_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | | X119 | O_HPWM10_1.1A | 高边功率驱动,额定1.1A,峰值2A,支持PWM和开关两种工作模式 | <b>低端恒流驱动</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | --------------- | -------------------------------------- | | X76 | O_CURRENT1_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X77 | O_CURRENT2_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X78 | O_CURRENT3_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | | X91 | O_CURRENT4_LS3A | 低边恒流,电流范围0~2.7A,兼容PWM工作模式与开关工作模式,带内部诊断 | <b>H桥驱动</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | --------------- | ----------------------------------- | | X88 | O_BRIDGE1+_1.9A | H桥驱动信号输出,第1路正,额定1.9A,峰值3A,内部高精度电流回采 | | X89 | O_BRIDGE1-_1.9A | H桥驱动信号输出,第1路负,额定1.9A,峰值3A,内部高精度电流回采 | | X96 | O_BRIDGE2+_1.9A | H桥驱动信号输出,第2路正,额定1.9A,峰值3A,内部高精度电流回采 | | X97 | O_BRIDGE2-_1.9A | H桥驱动信号输出,第2路负,额定1.9A,峰值3A,内部高精度电流回采 | | X104 | O_BRIDGE3+_1.9A | H桥驱动信号输出,第3路正,额定1.9A,峰值3A,内部高精度电流回采 | | X105 | O_BRIDGE3-_1.9A | H桥驱动信号输出,第3路负,额定1.9A,峰值3A,内部高精度电流回采 | | X114 | O_BRIDGE4+_1.9A | H桥驱动信号输出,第4路正,额定1.9A,峰值3A,内部高精度电流回采 | | X117 | O_BRIDGE4-_1.9A | H桥驱动信号输出,第4路负,额定1.9A,峰值3A,内部高精度电流回采 | <b>模拟量输出</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ----- | ---------- | | X83 | O_AO1 | 模拟量输出1-10V | | X84 | O_AO2 | 模拟量输出1-10V | ### 4.通信类管脚<a name="通信类管脚"></a> <b>PSI5通信</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ---- | ------------ | | X98 | GND1 | PSI5接口的接地回路1 | | X99 | GND2 | PSI5接口的接地回路2 | | X100 | GND3 | PSI5接口的接地回路3 | | X101 | GND4 | PSI5接口的接地回路4 | | X106 | PSI1 | PSI5外设1 | | X107 | PSI2 | PSI5外设2 | | X108 | PSI3 | PSI5外设3 | | X109 | PSI4 | PSI5外设4 | <b>LIN通信</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ---- | ------ | | X17 | LIN0 | LIN0总线 | | X36 | LIN1 | LIN1总线 | <b>Ethernet通信</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ----- | ------------------- | | X18 | TRX_P | Ethernet终端发送/接收信号,正 | | X37 | TRX_M | Ethernet终端发送/接收信号,负 | <b>CAN通信</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ------ | -------------------------- | | X49 | CAN0_H | CAN0,高,内部集成120R终端电阻,带CAN唤醒 | | X68 | CAN0_L | CAN0,低,内部集成120R终端电阻,带CAN唤醒 | | X48 | CAN1_H | CAN1,高,内部集成120R终端电阻,带CAN唤醒 | | X67 | CAN1_L | CAN1,低,内部集成120R终端电阻,带CAN唤醒 | | X47 | CAN2_H | CAN2,高,内部集成120R终端电阻 | | X66 | CAN2_L | CAN2,低,内部集成120R终端电阻 | | X50 | CAN3_H | CAN3,高,内部集成120R终端电阻,标定CAN | | X69 | CAN3_L | CAN3,低,内部集成120R终端电阻,标定CAN | | X46 | CAN4_H | CAN4,高,内部集成120R终端电阻 | | X65 | CAN4_L | CAN4,低,内部集成120R终端电阻 | | X45 | CAN5_H | CAN5,高,内部集成120R终端电阻 | | X64 | CAN5_L | CAN5,低,内部集成120R终端电阻 | | X44 | CAN6_H | CAN6,高,内部集成120R终端电阻 | | X63 | CAN6_L | CAN6,低,内部集成120R终端电阻 | | X90 | CAN7_H | CAN7,高,内部集成120R终端电阻 | | X82 | CAN7_L | CAN7,低,内部集成120R终端电阻 | <b>SENT通信</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ---- | ---------- | | X110 | SENT | SENT信号输入端口 | <b>FlexRay通信</b> | 管脚编号 | 信号定义 | 信号说明 | | ---- | ---- | ---------- | | X51 | BP | FlexRay总线正 | | X52 | BM | FlexRay总线负 | ## 六.接插件示意图<a name="接插件示意图"></a>  | 接插件信息(TE) | 型号 | | ----------- | --------- | | 121P公头 | 2374035-1 | | 81P母头 | 1473244-1 | | 81P母头盖子 | 1473247-1 | | 81P母头定位器 | 368382-1 | | 40P母头 | 1473252-1 | | 40P母头盖子 | 1473255-1 | | 40P母头定位器 | 368388-1 | | 小端子(0.5mm2) | 968221-1 | | 大端子(1.5mm2) | 964273-2 | ## 七.硬件最小系统接线图<a name="硬件最小系统接线图"></a> 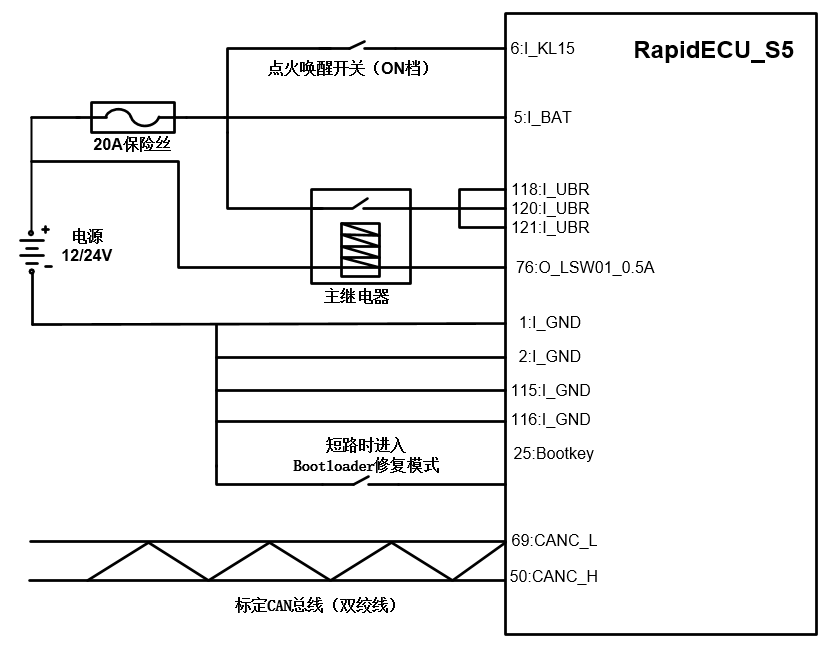 ## 八.外形尺寸图<a name="外形尺寸图"></a>  ## 九.电路原理示意图<a name="电路原理示意图"></a> ### 1.模拟量输入_下拉型<a name="模拟量输入_下拉型"></a> 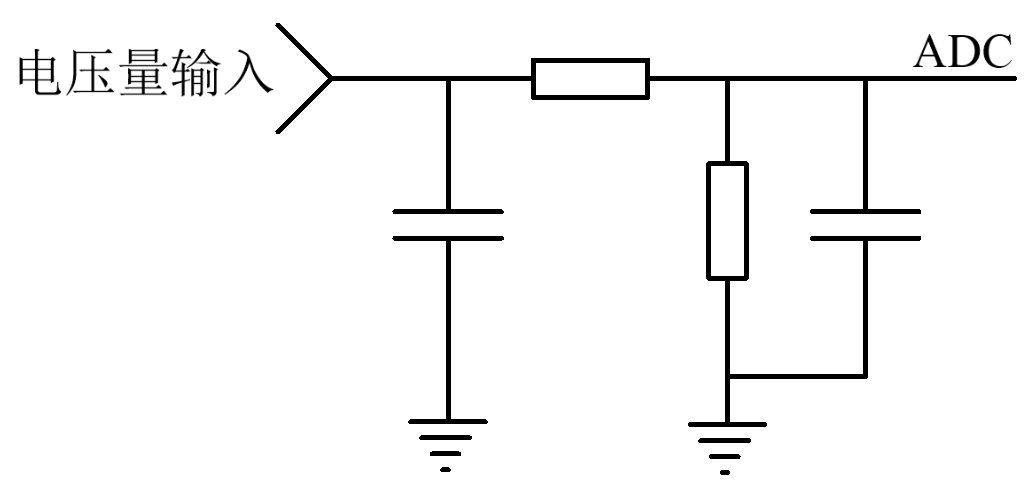 关键参数: - 电压模拟量,0~5V输入。 ### 2.模拟量输入_上拉型<a name="模拟量输入_上拉型"></a> 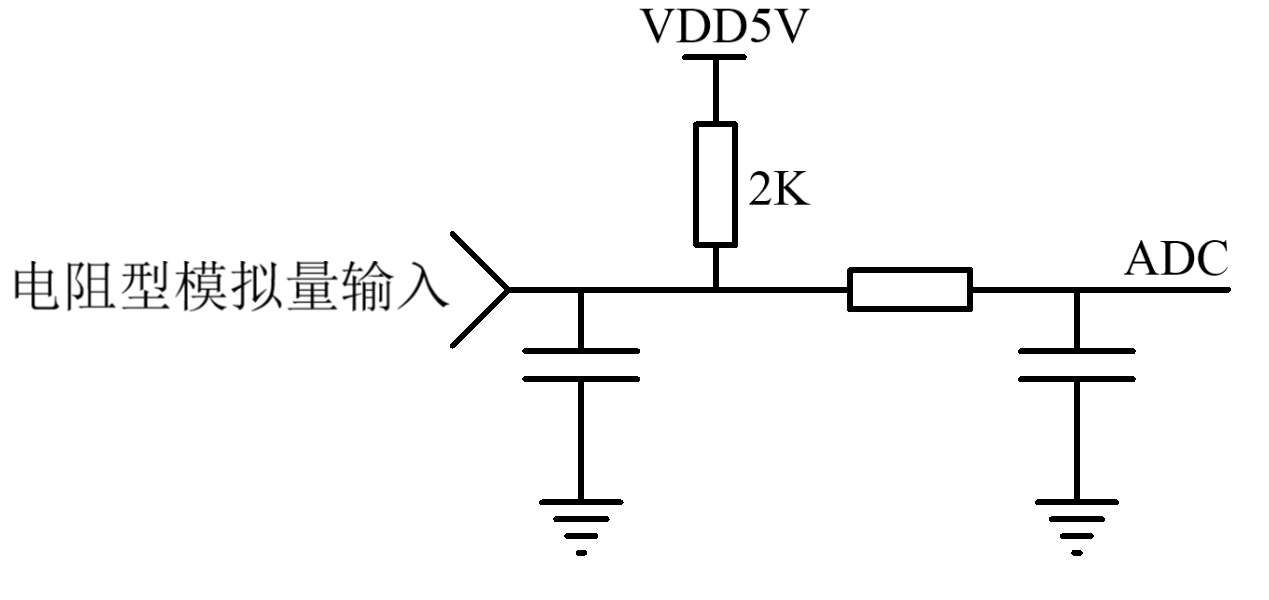 关键参数: - 电阻型模拟量输入,内部上拉2K电阻到5V。 ### 3.开关量输入<a name="开关量输入"></a> 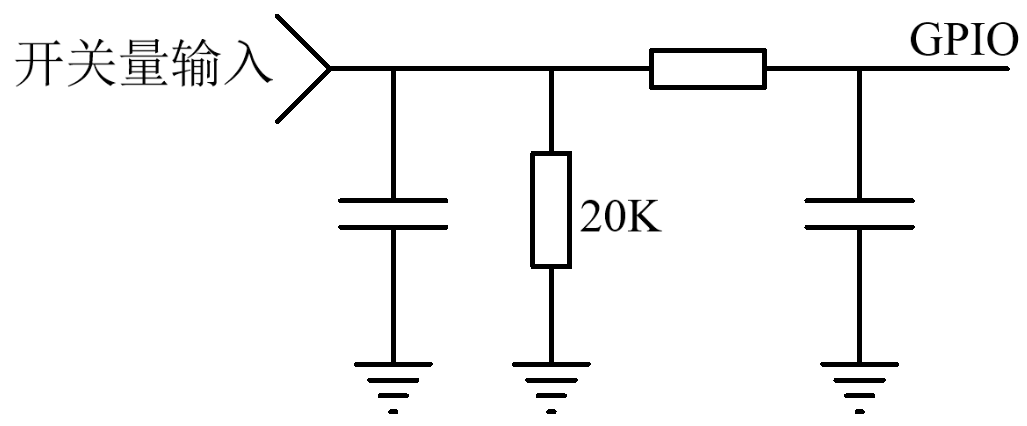 关键参数: - 20k下拉到地,高有效(高电平不超过5V)。 ### 4.频率量输入<a name="频率量输入"></a> 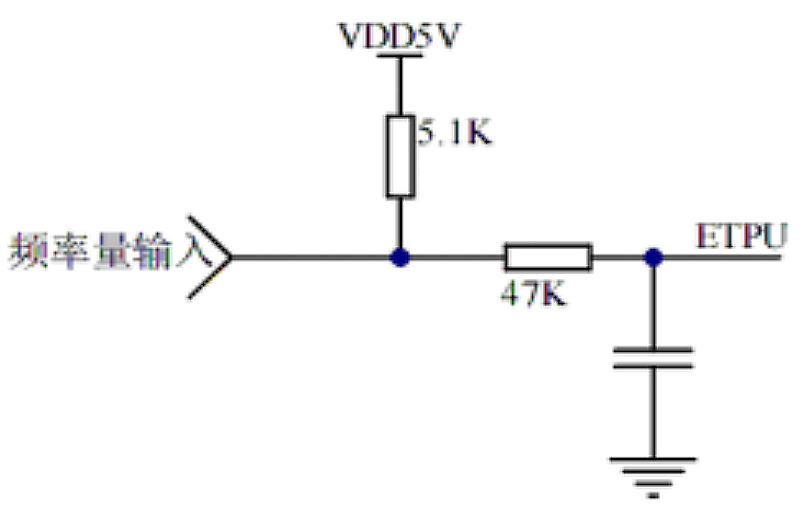 关键参数: - 5.1K上拉到5V,频率范围10Hz~20KHz。 ### 5.CAN总线<a name="CAN总线"></a> 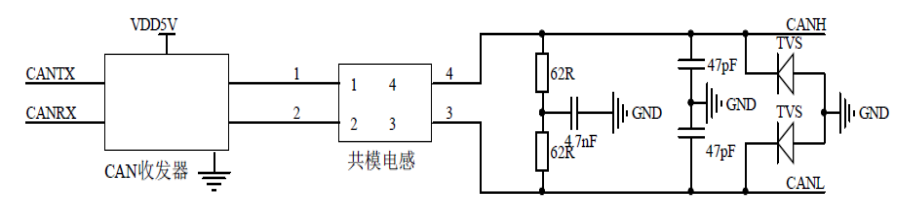 关键参数: - 8路支持CAN FD,CAN2.0B,ISO11898,其中2路支持CAN唤醒。 ### 6.LIN总线<a name="LIN总线"></a> 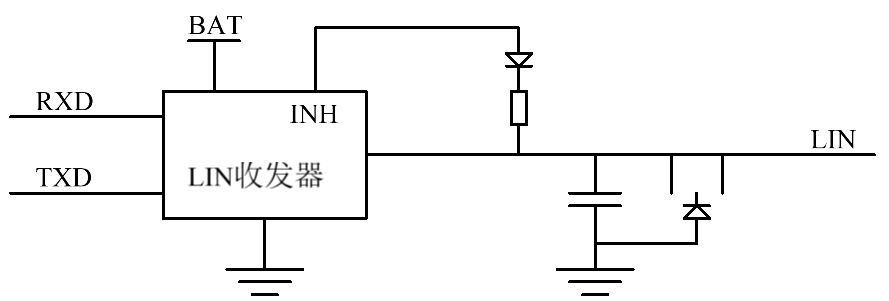 关键参数: - 2路LIN,主机模式,符合LIN2.x规范,符合ISO 17987。 ### 7.FlexRay<a name="FlexRay"></a> 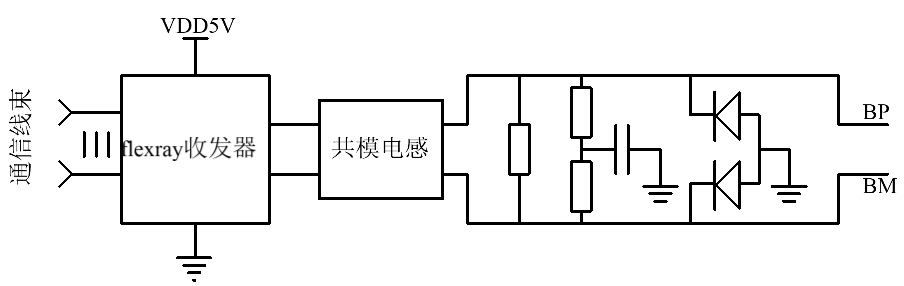 关键参数: - 兼容ISO 17458-4:2013规范。 ### 8.Ethernet<a name="Ethernet"></a> 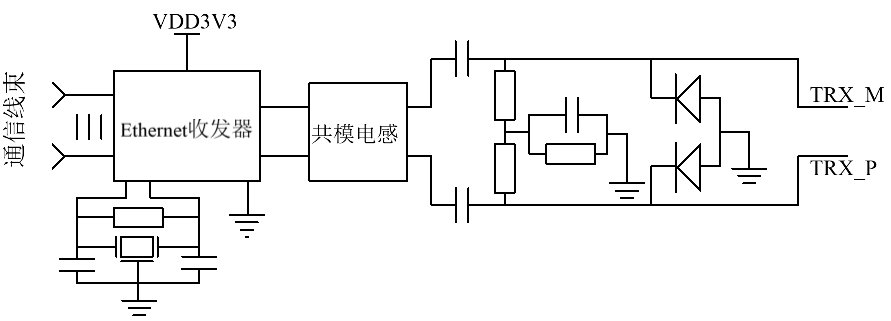 关键参数: - 100BASE-T1标准。 ### 9.PSI5<a name="PSI5"></a> 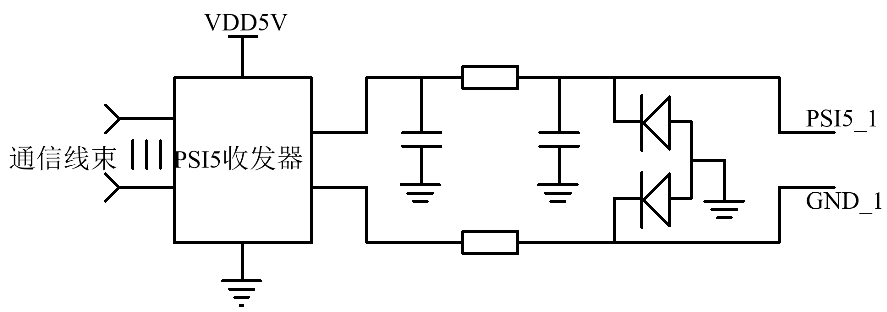 关键参数: - 兼容rev1.3及rev2.X,最多可扩展24路PSI5传感器。 ### 10.SENT<a name="SENT"></a> 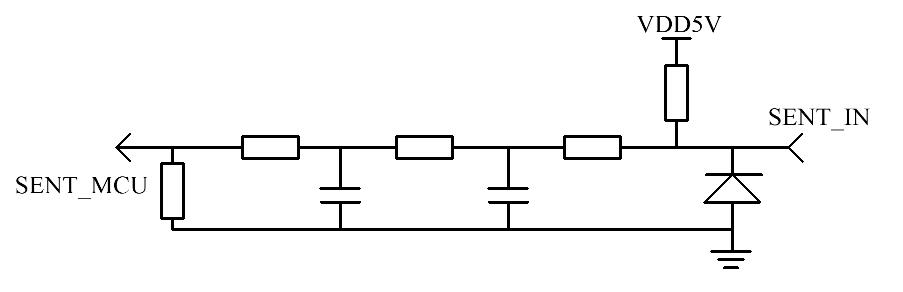 关键参数: - 内部上拉到5V ### 11.低边功率驱动<a name="低边功率驱动"></a> 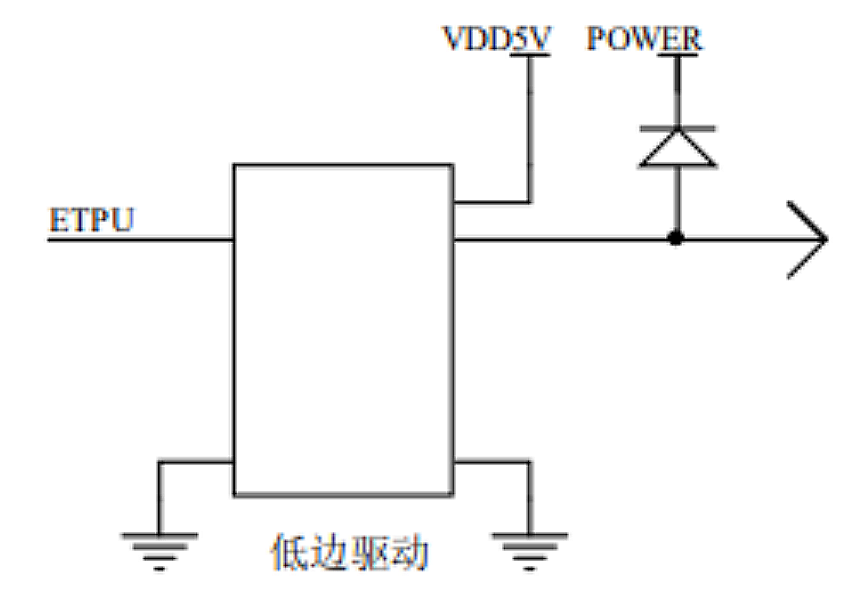 关键参数: - 带续流二极管,兼容PWM工作模式与开关工作模式,额定电流1.1A。 ### 12.高边功率驱动<a name="高边功率驱动"></a> 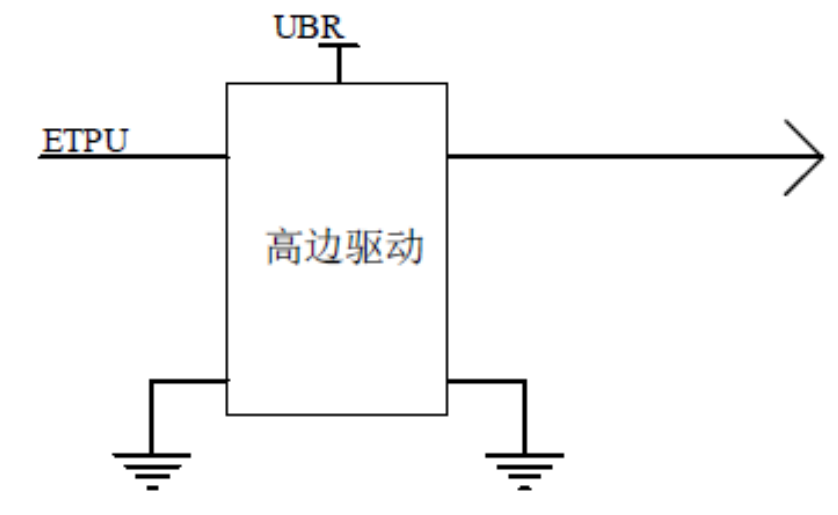 关键参数: - 兼容PWM工作模式与开关工作模式,额定电流1.1A。 ### 13.H桥驱动<a name="H桥驱动"></a> 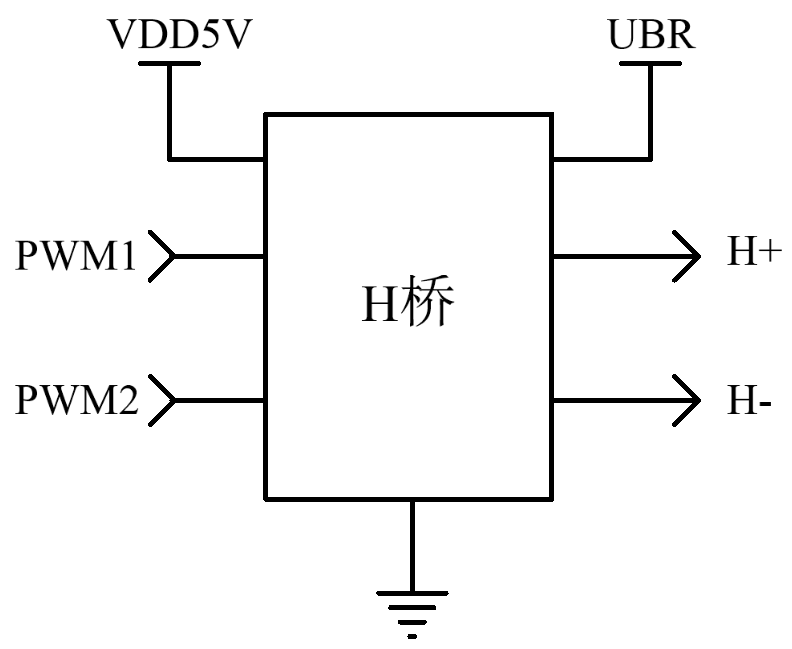 关键参数: - 额定1.9A,峰值3A。 ## 十.使用注意事项<a name="使用注意事项"></a> 1. 将样品或样机用于批量生产机器时无法保证可靠运行。 2. 所提议的电路并不意味着控制器对系统承担任何技术责任。 3. 连接错误会导致控制单元输出端处出现意外信号。 4. 控制单元编程或参数设置不正确可能导致系统运行时出现潜在危险。系统制造商有责任进行危险分析时识别此类危险,并提醒最终用户注意这些危险。对此类危险概不承担责任。 5. 控制单元的维修只能由华海科技或华海授权的合作伙伴进行。 6. 确保当电子元件断电时没有针脚连接到电压源。因此,当电流源关闭时,必须将电子元件、输出端和外部传感器的电源一起关闭。 7. 不得将控制单元安装在产生大量热量的零件 (如排气管) 附近。 8. 在电气焊接和喷涂操作过程中,必须拔下电子元件的所有插头。 9. 电缆/导线必须单独密封,以防止水进入设备。 10. 壳体建议连接到车辆地线,以遵守 EMC 准则。金属螺钉用来与车辆地线连接。 11. 在给输出级接线时,应考虑每个输出级组的最大累积输出电流。累积输出电流指长期、同时作用于输出级的电流。 12. 只有产品在断电时才能对产品进行接线。 13. 电子元件的接线不可布置在机器或车辆导电线路附近。 14. 线束应以机械方式固定在安装控制单元的地方 (间距 < 150 mm)。应将线束固定在控制单元上出现同相激励的位置 (例如在控制单元锚固点)。 15. 如有可能,线路应布置在车辆内部。如果线路布置在车辆外部,应确保其安全固定。 线路不得打结或扭曲,不得摩擦边缘,不得在没有防护的情况下穿过边缘锋利的线管。 对于高温或移动车辆部件,线路之间要有足够的间距。 16. 传感器电源不可通过外部连接件“上拉”,例如,更高电压的应用,因为它们仅用作电压源,而不是电压槽!拔掉传感器电源可能导致控制单元在连续运行期间出现意外故障和损坏。